pidtuneOptions
Define options for pidtune function
Description
Use a pidtuneOptions object to specify properties for tuning a
PID controller using the pidtune function.
Creation
Description
opt = pidTuneOptionspistuneOptions object with default properties.
opt = pidtuneOptions(Name=Value)opt =
pidtuneOptions(PhaseMargin=55) creates an options object with a phase margin
of 55 degrees.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes. For example, opt =
pidtuneOptions("PhaseMargin",55)creates an options object with a phase margin
of 55 degrees.
Properties
PhaseMargin — Target phase margin
60 (default) | positive scalar
Target phase margin in degrees, specified as a positive scalar.
pidtune attempts to design a controller such that the phase
margin is at least the value specified for PhaseMargin. The
selected crossover frequency could restrict the achievable phase margin. Typically,
higher phase margin improves stability and overshoot, but limits bandwidth and response
speed.
DesignFocus — Closed-loop performance objective to favor in the design
'balanced' (default) | 'reference-tracking' | 'disturbance-rejection'
Closed-loop performance objective to favor in the design, specified as one of the following:
'balanced'(default) — For a given robustness, tune the controller to balance reference tracking and disturbance rejection.'reference-tracking'— Tune the controller to favor reference tracking, if possible.'disturbance-rejection'— Tune the controller to favor disturbance rejection, if possible.
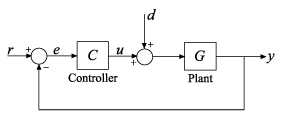
For a given target phase margin, pidtune chooses a controller
design that balances the two measures of performance, reference tracking and disturbance
rejection. When you change the DesignFocus option, the tuning
algorithm attempts to adjust the PID gains to favor either reference tracking or
disturbance rejection while achieving the same target phase margin. In the control
architecture assumed by pidtune, shown in the following diagram,
reference tracking is the response at y to signals at
r, and disturbance rejection is the suppression at
y of signals at d.
The more tunable parameters there are in the system, the more likely it is that the PID algorithm can achieve the desired design focus without sacrificing robustness. For example, setting the design focus is more likely to be effective for PID controllers than for P or PI controllers. In all cases, how much you can fine-tune the performance of the system depends strongly on the properties of your plant.
For an example illustrating the effect of this option, see Tune PID Controller to Favor Reference Tracking or Disturbance Rejection (Command Line).
NumUnstablePoles — Number of unstable poles in the plant
0 (default) | nonnegative integer
Number of unstable poles in the plant, specified as a nonnegative integer.
When your plant is a frd model or a state-space model with internal
delays, you must specify the number of open-loop unstable poles (if any). Incorrect
values might result in PID controllers that fail to stabilize the real plant.
(pidtune ignores this option for other model types.)
Unstable poles are poles located at:
Re(s) > 0, for continuous-time plants
|z| > 1, for discrete-time plants
A pure integrator in the plant (s = 0) or (|z|
> 1) does not count as an unstable pole for NumUnstablePoles. If
your plant is a frd model of a plant with a pure integrator, for
best results, ensure that your frequency response data covers a low enough frequency to
capture the integrator slope.
Object Functions
pidtune | PID tuning algorithm for linear plant model |
Examples
Tips
Version History
Introduced in R2010b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)