Simscape Multibody (precedentemente SimMechanics) offre un ambiente di simulazione multibody per sistemi meccanici 3D, come i robot, le sospensioni dei veicoli, le apparecchiature per l’edilizia e i carrelli di atterraggio per aeromobili. È possibile modellare sistemi multibody usando blocchi che rappresentano corpi, elementi di collegamento e di forza, vincoli e sensori. Simscape Multibody formula e risolve equazioni di moto per l’intero sistema meccanico. È possibile importare assemblaggi CAD completi nel proprio modello, comprese tutte le masse, le inerzie, gli elementi di collegamento, i vincoli e la geometria 3D. Un’animazione 3D generata in automatico ti consentirà di visualizzare la dinamica del sistema.
Simscape Multibody consente di sviluppare sistemi di controllo e di testare le prestazioni a livello di sistema. Sarà possibile parametrizzare i propri modelli utilizzando variabili ed espressioni MATLAB, oltre a poter progettare sistemi di controllo per il sistema multibody in Simulink. Sarà possibile integrare impianti elettrici, idraulici, pneumatici e altri sistemi fisici nel proprio modello usando componenti della famiglia di prodotti Simscape. Simscape Multibody supporta la generazione di codice C per distribuire i modelli in altri ambienti di simulazione, tra cui i sistemi Hardware-In-the-Loop (HIL).
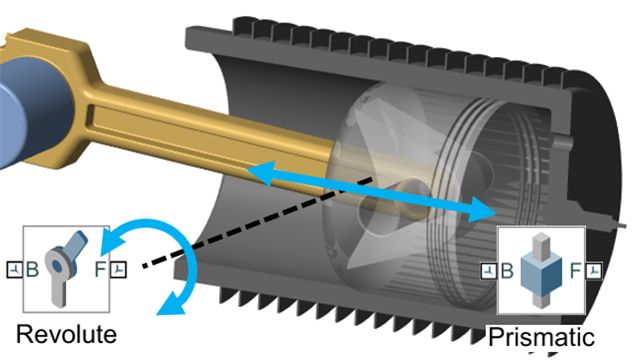
Simulazione di meccanismi 3D
Crea modelli multibody di un qualunque meccanismo 3D. Definisci le parti usando la geometria 3D parametrizzata o i dati CAD. Collega le parti con elementi di giunzione per stabilire i gradi di libertà.

Importazione di CAD
Converti automaticamente dei progetti CAD per creare un gemello digitale del tuo sistema. Fai direttamente riferimento a file provenienti da CATIA®, Creo™, Inventor®, NX™, Solid Edge®, SolidWorks® e Parasolid®
Azionamento elettrico e idraulico
Collega gli impianti elettronici, idraulici, pneumatici e altri tipi di sistemi direttamente al tuo modello meccanico 3D. Valuta la tecnologia dell’attuatore per verificarne la conformità ai requisiti prestazionali.
Forze di contatto
Modella il contatto intermittente e persistente tra modelli parametrici e solidi definiti nel software CAD. Definisci leggi delle forze personalizzate. Usa dei modelli di penumatici per il contatto strada/veicolo.
Corpi flessibili
Modella dei corpi flessibili servendoti di metodi di modellazione degli elementi finiti e teorici. Varia le proprietà con MATLAB per analizzare l’effetto di fenomeni quali l’estensione, la flessione e la torsione sul sistema.
Progettazione parametrica
Usa MATLAB per variare i parametri di progettazione quali la lunghezza, la massa e la tensione. Usa la simulazione dinamica con modelli astratti per completare i progetti meccanici con un numero inferiore di iterazioni.
Distribuzione dei modelli
Converti il tuo modello Simscape in codice C per testare algoritmi di controllo. Esegui test HIL su dSPACE®, Speedgoat, OPAL-RT e altri sistemi in tempo reale prima di eseguire test fisici.
MATLAB e Simulink
Usa MATLAB per automatizzare le attività quali l’assemblaggio del modello, il testing e la post-elaborazione. Usa Simulink per integrare gli algoritmi di controllo e le progettazioni hardware in un unico ambiente.

Dalla ricerca alla produzione
I modelli Simscape aiutano ad affinare i requisiti, a progettare i sistemi di controllo, a testare i controller embedded e a supportare il funzionamento in servizio come gemello digitale.
Risorse sui prodotti:
Famiglia di prodotti Simscape
La famiglia di prodotti Simscape fornisce modelli e tecnologie di risoluzione per la simulazione di sistemi fisici. Modella sistemi elettrici, meccanici, fluidi e altri sistemi fisici assemblando i componenti in uno schema.
Simscape
Modellazione e simulazione di sistemi fisici multidominio
Simscape Electrical
Modellazione e simulazione di sistemi elettronici, meccatronici e di alimentazione elettrica
Simscape Battery
Progettazione e simulazione di sistemi di accumulo dell’energia e di batterie
Simscape Fluids
Modellazione e simulazione di sistemi fluidodinamici
Simscape Driveline
Modellazione e simulazione di sistemi meccanici rotazionali e traslazionali
Simscape Multibody
Modellazione e simulazione di sistemi meccanici multibody

“Simulink, Simscape Multibody e Simulink Coder ci hanno permesso di passare in autonomia da un modello CAD accurato del veicolo MRO al codice C eseguito in tempo reale.”
Jim Chapel, Lockheed Martin Space Systems
Richiedi una versione di prova gratuita
30 giorni di prova a tua disposizione.
Pronto per acquistare?
Richiedi una quotazione e scopri i prodotti correlati.
Sei uno studente?
È possibile che la tua scuola già fornisca accesso a MATLAB, Simulink e ad altri prodotti complementari mediante una Campus-Wide License.



Puoi anche selezionare un sito web dal seguente elenco:
Americhe
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia-Pacifico
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)