Distribuzione
Il pacchetto di supporto MATLAB Coder™ per le piattaforme NVIDIA® Jetson™ e NVIDIA DRIVE® consente di distribuire la funzione di MATLAB sull'hardware. La funzione viene distribuita come un eseguibile autonomo che continua ad essere eseguito anche se il collegamento hardware live viene disconnesso dal computer host.
Funzioni
Argomenti
MATLAB
- Build and Run an Executable on NVIDIA Hardware
Build and run an executable on NVIDIA hardware. - Build and Run an Executable on NVIDIA Hardware Using GPU Coder App
Use GPU Coder™ app to build and run an executable on NVIDIA hardware. - Read Video Files on NVIDIA Hardware
Generate CUDA® code for reading video files on the NVIDIA target by using thevideoReaderfunction. - Stop or Restart an Executable Running on NVIDIA Hardware
Stop or restart an executable running on the hardware. - Processor-in-the-Loop Execution from Command Line
Use PIL execution to verify the numerical behavior of the generated code at the MATLAB command line. - Processor-In-The-Loop Execution with the GPU Coder App
Use the GPU Coder app to verify the numerical behavior of the generated code. - Execution-Time Profiling for PIL
Why measure execution times for code generated from entry-point functions.
Simulink
- Targeting NVIDIA Embedded Boards
Build and deploy to NVIDIA GPU boards. - Numerical Equivalence Testing (GPU Coder)
Compare results from model and generated code simulations. - Parameter Tuning and Signal Monitoring Using External Mode (GPU Coder)
Tune parameters and monitor signals through a TCP/IP communication channel between development computer and target hardware. - Execution-Time Profiling for NVIDIA Jetson Platforms in Simulink
Generate an execution-time profile to profile generated code on NVIDIA Jetson platforms.
Esempi in primo piano
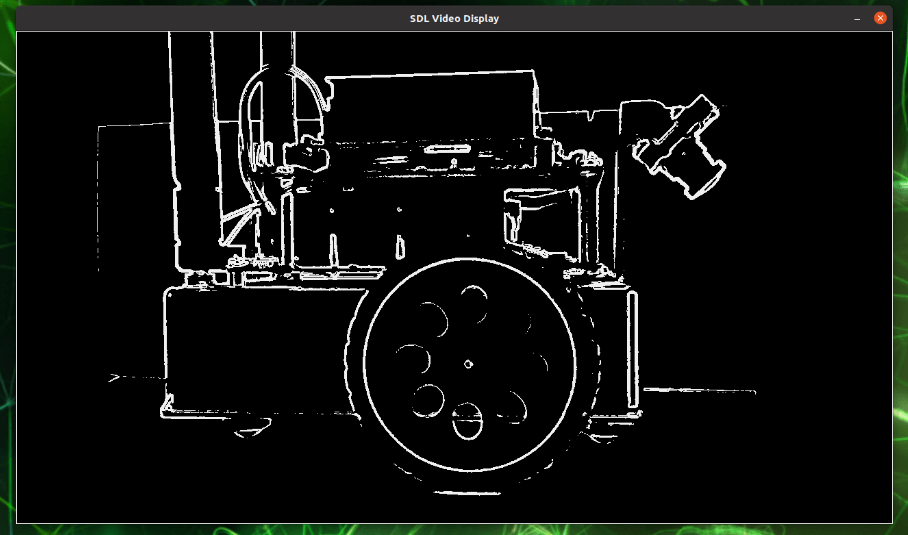
Deploy an Edge Detection Application to Target ARM Cores of NVIDIA Jetson
Perform edge detection using NVIDIA Jetson on video captured by a connected camera.

Deploy and Run Sobel Edge Detection on NVIDIA Jetson
This step of the example shows how to deploy a MATLAB® function onto an NVIDIA® Jetson™ board. You generate CUDA® code that takes snapshots using a webcam on the Jetson board, detects edges in the snapshots, and displays the output on the Jetson board. The Jetson board runs the code without using MATLAB.
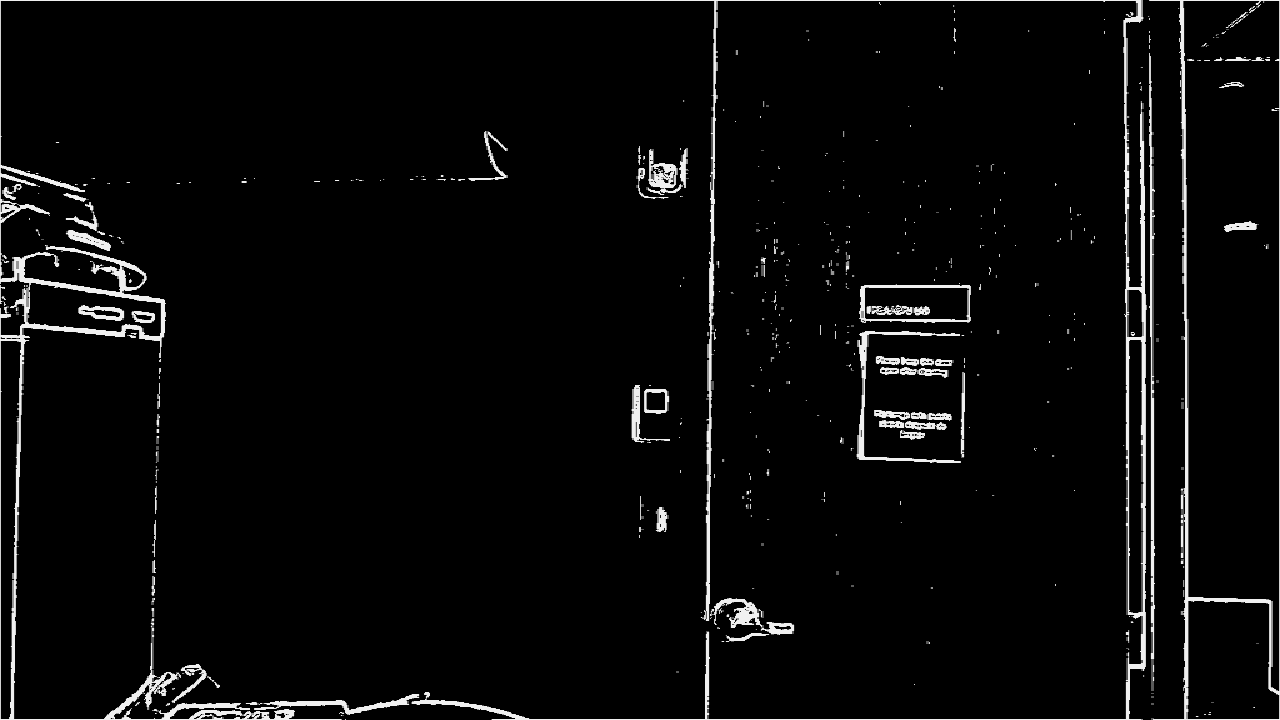
Sobel Edge Detection on NVIDIA Jetson Nano Using Raspberry Pi Camera Module V2
Capture and process images from a Raspberry Pi® Camera Module V2 connected to the NVIDIA® Jetson™ Nano. The MATLAB® Coder™ Support Package for NVIDIA Jetson and NVIDIA DRIVE® Platforms allows you to capture images from the Camera Module V2 and bring them into the MATLAB environment for processing. In this example you learn how to develop a Sobel edge detection algorithm by using this capability.
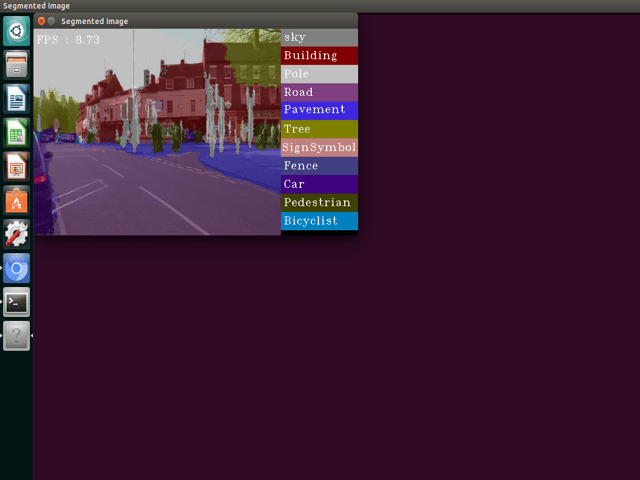
Semantic Segmentation on NVIDIA DRIVE
Generate and deploy a CUDA® executable for an image segmentation application that uses deep learning. It uses the MATLAB® Coder™ Support Package for NVIDIA® Jetson™ and NVIDIA DRIVE™ Platforms to deploy the executable on the NVIDIA DRIVE platform. This example performs code generation on the host computer and builds the generated code on the target platform by using remote build capability of the support package. For more information, see Code Generation for Semantic Segmentation Network (GPU Coder).

Processor-in-the-Loop Execution on NVIDIA Targets Using GPU Coder
How the MATLAB® Coder™ Support Package for NVIDIA® Jetson™ and NVIDIA DRIVE® Platforms enables GPU Coder™ to run PIL execution on NVIDIA DRIVE and Jetson hardware platforms. This example uses the GPU Code generation for fog rectification example from GPU Coder to demonstrate PIL execution. For more information, see Generate GPU Code for Fog Rectification Algorithm (GPU Coder).

Verify Generated Code on NVIDIA Targets Using PIL in Simulink
Compare Simulink® simulations to processor-in-the-loop (PIL) simulations on NVIDIA Jetson.

Top-Hat Filtering to Remove Uneven Background Illumination on NVIDIA Jetson TX2 Developer Kit
Deploy Image Processing Toolbox™ algorithms to NVIDIA® Jetson™ TX2 board using the MATLAB® Coder™ Support Package for NVIDIA Jetson and NVIDIA DRIVE® Platforms. The imtophat (Image Processing Toolbox) function that performs morphological top-hat filtering on a grayscale image is used as an example to demonstrate this concept. Top-hat filtering computes the morphological opening of the image (using imopen (Image Processing Toolbox)) and then subtracts the result from the original image. The generated CUDA® code uses shared memory to speed up the operations on the GPU.
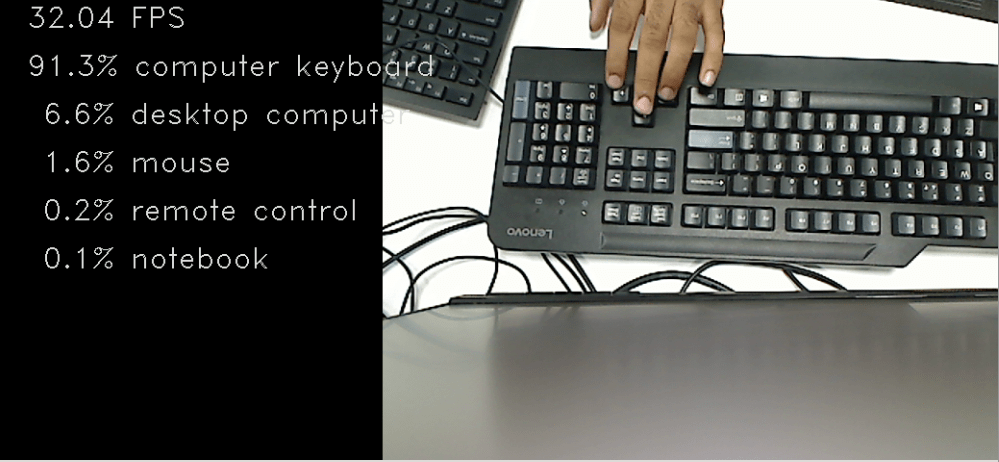
Deployment and Classification of Webcam Images on NVIDIA Jetson TX2 Platform
Generate CUDA® code from a DAGNetwork object and deploy the generated code onto the NVIDIA® Jetson® TX2 board using the MATLAB® Coder™ Support Package for NVIDIA Jetson™ and NVIDIA DRIVE® Platforms. This example uses the resnet50 deep learning network to classify images from a USB webcam video stream.

Deploy and Run Fog Rectification for Video on NVIDIA Jetson
Generate and deploy a CUDA® executable for a video-based fog rectification application. The example shows the deployable code generation capabilities that the MATLAB® Coder™ Support Package for NVIDIA® Jetson™ and NVIDIA DRIVE™ Platforms provides for the MATLAB VideoReader function. This example generates a CUDA application that reads the contents of a video file, performs fog rectification, and displays the output video on the NVIDIA hardware.

Deploy and Classify Webcam Images on NVIDIA Jetson Platform from Simulink
Deploy a Simulink® model on the NVIDIA® Jetson™ board for classifying webcam images. This example classifies images from a webcam in real-time by using the pretrained deep convolutional neural network, ResNet-50. The Simulink model in the example uses the camera and display blocks from the MATLAB® Coder™ Support Package for NVIDIA Jetson and NVIDIA DRIVE™ Platforms to capture the live video stream from a webcam and display the prediction results on a monitor connected to the Jetson platform.
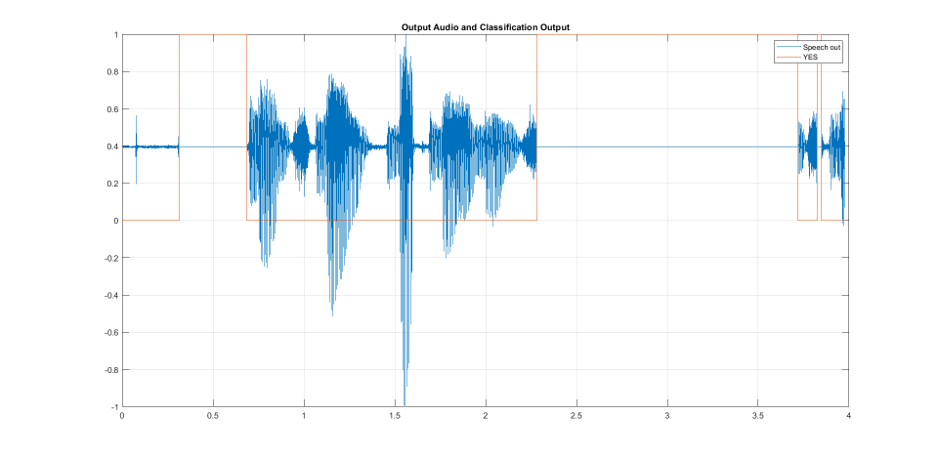
Keyword Spotting in Audio Using MFCC and LSTM Networks on NVIDIA Embedded Hardware from Simulink
Deploy a Simulink® model on the NVIDIA® Jetson™ board for keyword spotting in audio data. This example identifies the keyword(YES) in the input audio data using Mel Frequency Cepstral Coefficients (MFCC) and a pretrained Bidirectional Long Short-Term Memory (BiLSTM) network.
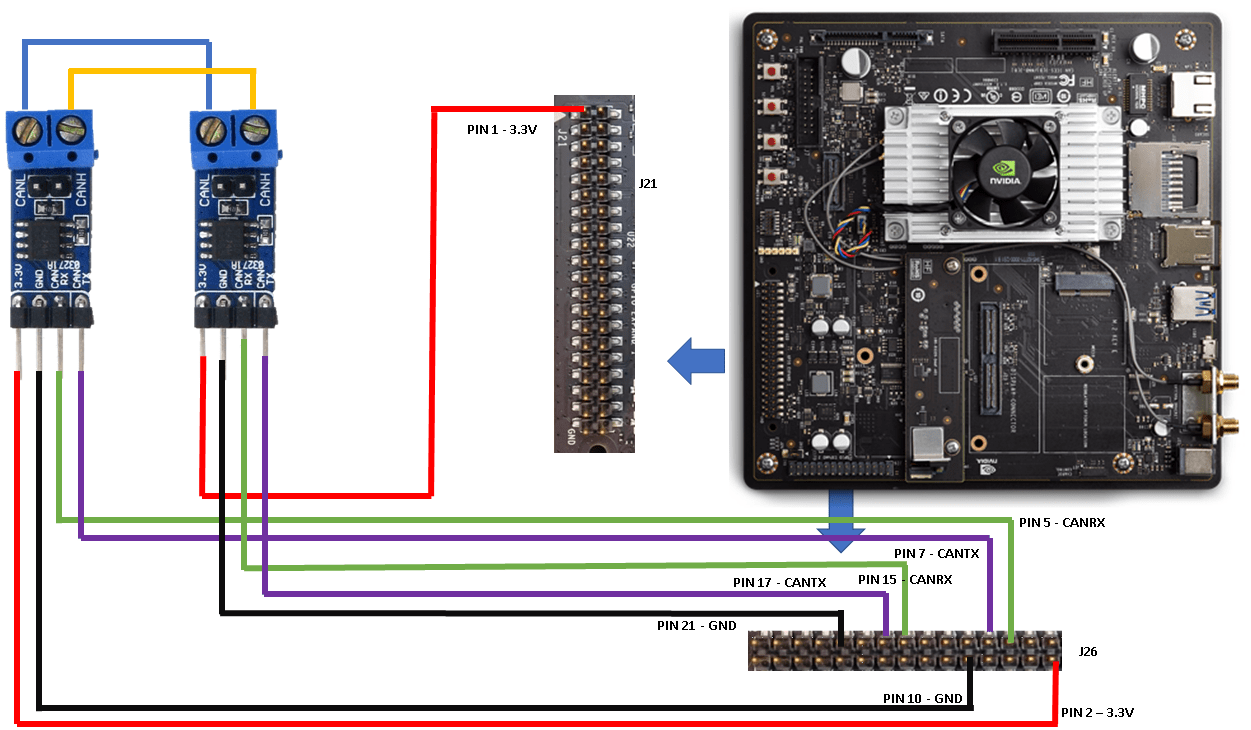
CAN Bus Communication on NVIDIA Jetson TX2 in Simulink
Deploy a Simulink® model that uses CAN communication for a deep learning application. The Simulink model in this example uses the CAN Transmit and CAN Receive blocks from the MATLAB® Coder™ Support Package for NVIDIA® Jetson® and NVIDIA DRIVE® Platforms to model a CAN bus system on the Jetson TX2 platform. The model uses the CAN bus to transmit the recognized traffic sign objects in a video frame from one CAN node to another CAN node.
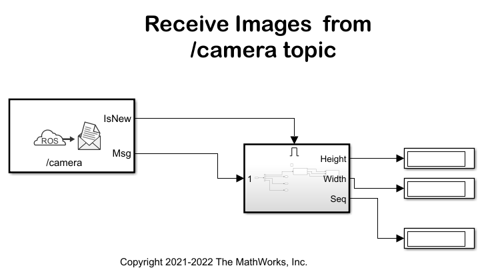
Stream Images from NVIDIA Jetson Xavier NX Using Robot Operating System (ROS)
Stream images captured from a webcam on NVIDIA® Jetson™ Xavier NX board to the host computer using ROS communication interface.

GPU Profiling on NVIDIA Jetson Platforms
Analyze the performance of generated CUDA code on the Jetson platform.