noise2meas
Noise component of linear identified model
Description
noiseModel = noise2meas(sys)sys.
Use noise2meas to convert a time-series model (no inputs) to an
input/output model. You can use the converted model for linear analysis, including
viewing pole/zero maps and plotting the step response.
noiseModel = noise2meas(sys,noise)
Examples
Convert Noise Component of Linear Identified Model into Input/Output Model
Convert a time-series model to an input/output model that may be used by linear analysis tools.
Identify a time-series model.
load iddata9 z9 sys = ar(z9,4,'ls');
sys is an idpoly model with no inputs.
Convert sys to a measured model.
noise_model = noise2meas(sys);
noise_model is an idpoly model with one input.
You can use noise_model for linear analysis functions such as step, iopzmap, etc.
Normalizing Noise Variance
Convert an identified linear model to an input/output model, and normalize its noise variance.
Identify a linear model using data.
load twotankdata;
z = iddata(y,u,0.2);
sys = ssest(z,4);sys is an idss model, with a noise variance of 6.6211e-06. The value of is sqrt(sys.NoiseVariance), which is 0.0026.
View the disturbance matrix.
sys.K
ans = 4×1
0.2719
1.6570
0.6318
0.2877
Obtain a model that absorbs the noise variance of sys.
noise_model_normalize = noise2meas(sys,'normalize');noise_model_normalize is an idpoly model.
View the matrix for noise_model_normalize
noise_model_normalize.B
ans = 4×1
0.0007
0.0043
0.0016
0.0007
As expected, noise_model_normalize.B is equal to L*sys.K.
Compare the bode response with a model that ignores the noise variance of sys.
noise_model_innovation = noise2meas(sys,'innovations'); bodemag(noise_model_normalize,noise_model_innovation); legend('Normalized noise variance','Ignored noise variance');
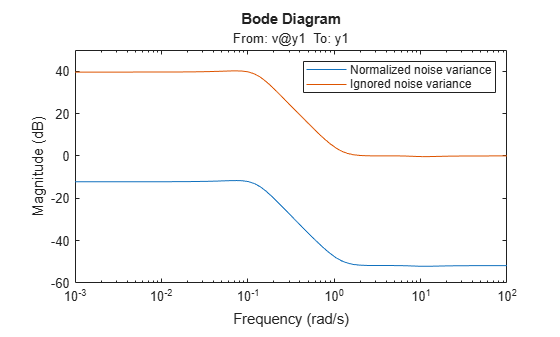
The difference between the bode magnitudes of the noise_model_innovation and noise_model_normalized is approximately 51 dB. As expected, the magnitude difference is approximately equal to 20*log10(L).
Input Arguments
Output Arguments
Version History
Introduced in R2012a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)