Effect of Input Intersample Behavior on Continuous-Time Models
The intersample behavior of the input signals influences the estimation, simulation and prediction of continuous-time models. A sampled signal is characterized only by its values at the sampling instants. However, when you apply a continuous-time input to a continuous-time system, the output values at the sampling instants depend on the inputs at the sampling instants and on the inputs between these points.
The iddata and idfrd objects have an
InterSample property which stores how the input behaves
between the sampling instants. You can specify the behavior between the samples to be
piecewise constant (zero-order hold), linearly interpolated between the samples
(first-order hold) or band-limited. A band-limited intersample behavior of the input
signal means:
A filtered input signal (an input of finite bandwidth) was used to excite the system dynamics.
The input was measured using a sampling device (A/D converter with antialiasing) that reported it to be band-limited even though the true input entering the system was piecewise constant or linear. In this case, the sampling devices can be assumed to be a part of the system being modeled.
When the input signal is a band-limited discrete-time frequency-domain data
(iddata with domain = 'frequency' or
idfrd with sample time Ts≠0), the model
estimation is performed by treating the data as continuous-time data (Ts =
0). For more information, see Pintelon, R. and J. Schoukens,
System Identification. A Frequency Domain Approach,
section 10.2, pp-352-356,Wiley-IEEE Press, New York, 2001.
The intersample behavior of the input data also affects the results of simulation
and prediction of continuous-time models. sim and predict commands use the
InterSample property to choose the right algorithm for
computing model response.
The following example simulates a system using first-order hold ( foh ) intersample behavior for input signal.
sys = idtf([-1 -2],[1 2 1 0.5]); rng('default') u = idinput([100 1 5],'sine',[],[],[5 10 1]); Ts = 2; y = lsim(sys,u,(0:Ts:999)','foh');
Create an iddata object for the simulated input-output data.
data = iddata(y,u,Ts);
The default intersample behavior is zero-order hold (zoh).
data.InterSample
ans = 'zoh'
Estimate a transfer function using this data.
np = 3; % number of poles nz = 1; % number of zeros opt = tfestOptions('InitializeMethod','all','Display','on'); opt.SearchOptions.MaxIterations = 100; modelZOH = tfest(data,np,nz,opt)
modelZOH =
From input "u1" to output "y1":
-217.2 s - 391.6
---------------------------------
s^3 + 354.4 s^2 + 140.2 s + 112.4
Continuous-time identified transfer function.
Parameterization:
Number of poles: 3 Number of zeros: 1
Number of free coefficients: 5
Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using TFEST on time domain data "data".
Fit to estimation data: 81.38%
FPE: 0.1146, MSE: 0.111
Model Properties
The model gives about 80% fit to data. The sample time of the data is large enough that intersample inaccuracy (using zoh rather than foh ) leads to significant modeling errors.
Re-estimate the model using foh intersample behavior.
data.InterSample = 'foh';
modelFOH = tfest(data,np,nz,opt)modelFOH =
From input "u1" to output "y1":
-1.197 s - 0.06843
-------------------------------------
s^3 + 0.4824 s^2 + 0.3258 s + 0.01723
Continuous-time identified transfer function.
Parameterization:
Number of poles: 3 Number of zeros: 1
Number of free coefficients: 5
Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using TFEST on time domain data "data".
Fit to estimation data: 97.7%
FPE: 0.001748, MSE: 0.001693
Model Properties
modelFOH is able to retrieve the original system correctly.
Compare the model outputs with data.
compare(data,modelZOH,modelFOH)
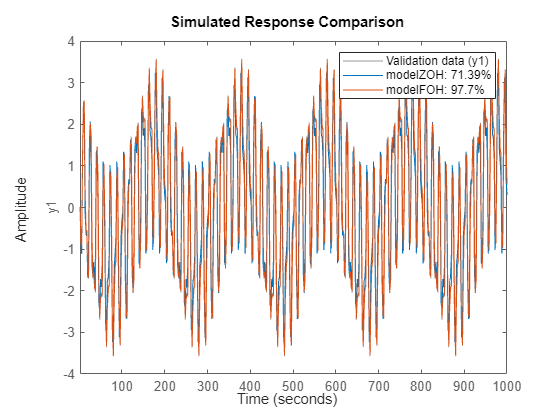
modelZOH is compared to data whose intersample behavior is foh. Therefore, its fit decreases to around 70%.