Vehicle Body
Vehicle body with two axles in longitudinal motion

Libraries:
Simscape /
Driveline /
Tires & Vehicles
Description
The Vehicle Body block represents a two-axle vehicle body in longitudinal motion. The vehicle can have the same or a different number of wheels on each axle. For example, two wheels on the front axle and one wheel on the rear axle. The vehicle wheels are assumed identical in size. The vehicle can also have a center of gravity (CG) that is at or below the plane of travel.
The block accounts for body mass, aerodynamic drag, road incline, and weight distribution between axles due to acceleration and road profile. Optionally include pitch and suspension dynamics. The vehicle does not move vertically relative to the ground.
The block has an option to include an externally-defined mass and an externally-defined inertia. The mass, inertia, and center of gravity of the vehicle body can vary over the course of simulation in response to system changes. You can also optionally control the drag coefficient with a physical signal.
Model
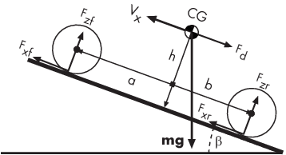
The vehicle axles are parallel and form a plane. The longitudinal, x, direction lies in this plane and perpendicular to the axles. If the vehicle is traveling on an incline slope, β, the normal, z, direction is not parallel to gravity but is always perpendicular to the axle-longitudinal plane.
This figure and table define the vehicle motion model variables.
Vehicle Dynamics and Motion
Vehicle Model Variables
| Symbol | Description |
|---|---|
| g | Gravitational acceleration parameter. |
| β | Road incline angle, parameter beta. |
| m | Mass of the vehicle, specified by either the Mass parameter or port M. |
| h | Height of vehicle center of gravity (CG) above the ground. |
| a, b | Distance of front and rear axles, respectively, from the normal projection point of vehicle CG onto the common axle plane. |
| Vx | Velocity of the vehicle. When Vx > 0, the vehicle moves forward. When Vx < 0, the vehicle moves backward. |
| Vw | Wind speed. When Vw > 0, the wind is headwind. When Vw < 0, the wind is tailwind. |
| n | Number of wheels per axle parameter. You can use an integer or a two-element vector where the elements represent the front and rear axles, respectively. |
| Fxf, Fxr | Longitudinal forces on each wheel at the front and rear ground contact points, respectively. |
| Fzf, Fzr | Normal load forces on each wheel at the front and rear ground contact points, respectively. |
| A | Effective frontal vehicle cross-sectional area. |
| Cd | Aerodynamic drag coefficient. |
| ρ | Mass density of air. |
| Fd | Aerodynamic drag force. |
Equations
The vehicle motion is a result of the net effect of all the forces and torques acting on it. The longitudinal tire forces push the vehicle forward or backward. The weight mg of the vehicle acts through its center of gravity (CG). Depending on the incline angle, the weight pulls the vehicle to the ground and pulls it either backward or forward. Whether the vehicle travels forward or backward, aerodynamic drag slows it down. For simplicity, the drag is assumed to act through the CG.
Zero normal acceleration and zero pitch torque determine the normal force on each front and rear wheel.
The wheel normal forces satisfy
If you include an externally-defined mass or inertia, the equations are shifted by the weighted value of the input.
Pitch acceleration depends on three torque components and the inertia of the vehicle:
Where:
ɑ is the pitch acceleration.
f is the longitudinal force.
h is the height of the center of gravity when measured parallel to the z-axis.
J is the inertia.
If you choose a linear model for suspension stiffness and damping, the block uses small angle approximation for pitch calculations. If you choose a table lookup model, the block uses the vectors that you specify calculate pitch dynamics. For hard stop equations, see Translational Hard Stop.
You can track the power dissipated due to aerodynamic drag. The
simlog workspace variable contains the
power_dissipated variable.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Limitations and Assumptions
The Vehicle Body block lets you model only longitudinal dynamics, parallel to the ground and oriented along the direction of motion. The vehicle is assumed to be in pitch and normal equilibrium. The block does not model pitch or vertical movement. As such, the equations assume that the wheels never lose contact. This constraint can result in negative normal forces.
Examples

Vehicle with Dual Clutch Transmission
A vehicle with a five-speed dual-clutch transmission. Gear shifts are implemented via the two clutches, one clutch pressure being ramped up as the other clutch pressure is ramped down. Gear pre-selection via dog clutches ensures that the correct gear is fully selected before the on-going clutch is enabled.

Vehicle with Four-Speed Transmission
A complete vehicle with Simscape™ Driveline™ components, including the engine, drivetrain, four-speed transmission, tires, and longitudinal vehicle dynamics. The transmission controller is implemented as a state machine in Stateflow®, selecting the gear based on throttle and vehicle speed.

Vehicle with Four-Wheel Drive
A four-wheel drive vehicle starting from rest and ascending a 15 degree incline. Initially the vehicle rolls backward until the engine develops sufficient torque to counter the slope. The tire compliance dynamics can be seen as the vehicle starts to accelerate. The model variant chosen for all of the tires can be set to the Simple, Friction Parameterized, or Magic Formula tire model using the hyperlinks in the model.

Vehicle with Manual Transmission
A vehicle that has a four-speed manual transmission. The key elements of the transmission are four synchronizers. By engaging or disengaging these synchronizers and associated dog clutches, the transmission provides four ratios 3.581, 2.022, 1.384, and 1, respectively. The synchronizers are modeled using the Cone Clutch and Dog Clutch blocks.