Specify Output
Sometimes, Simulink® cannot infer the output characteristics of your System object™ during model compilation. To give Simulink more information about the System object output, use these methods.
Set Output Size
Specify the size of a System object output using the getOutputSizeImpl method. Use
this method when Simulink cannot infer the output size from the inputs during model
compilation. For instance, when the System object has multiple inputs or outputs or has variable-size output.
For variable-size inputs, the propagated input size from
propagatedInputSizeImpl differs depending on the
environment.
MATLAB® — When you first run an object, it uses the actual sizes of the inputs.
Simulink — The maximum of all the input sizes is set before the model runs and does not change during the run.
Subclass from the matlab.System base class.
classdef CounterReset < matlab.SystemUse the getOutputSizeImpl method to specify the output
size.
methods (Access = protected) function sizeout = getOutputSizeImpl(~) sizeout = [1 1]; end end
View the method in the complete class definition file.
classdef CounterReset < matlab.System % CounterReset Count values above a threshold properties Threshold = 1 end properties (DiscreteState) Count end methods (Access = protected) function setupImpl(obj) obj.Count = 0; end function y = stepImpl(obj,u1,u2) % Add to count if u1 is above threshold % Reset if u2 is true if (u2) obj.Count = 0; elseif (any(u1 > obj.Threshold)) obj.Count = obj.Count + 1; end y = obj.Count; end function resetImpl(obj) obj.Count = 0; end function [sz,dt,cp] = getDiscreteStateSpecificationImpl(~,name) if strcmp(name,'Count') sz = [1 1]; dt = 'double'; cp = false; else error(['Error: Incorrect State Name: ', name.']); end end function dataout = getOutputDataTypeImpl(~) dataout = 'double'; end function sizeout = getOutputSizeImpl(~) sizeout = [1 1]; end function cplxout = isOutputComplexImpl(~) cplxout = false; end function fixedout = isOutputFixedSizeImpl(~) fixedout = true; end function flag = isInputSizeMutableImpl(~,idx) if idx == 1 flag = true; else flag = false; end end end end
Set Fixed- or Variable-Size Output
Specify the System object output is fixed-size. Fixed-size output is always the same size, while variable-size output can be different size vectors.
Simulink cannot infer the output size for variable-size output. To avoid
errors, implement isOutputFixedSizeImpl and getOutputSizeImpl.
isOutputFixedSizeImpl accepts System object handle and returns an array of flags. Array size is equal to the size
of the output ports. The value of the flags and their meanings are:
true— the output size is fixed (output port on MATLAB System block creates fixed-size signal)false— the output size is variable (output port on MATLAB System block creates variable-size signal)
Subclass from the matlab.System base
class.
classdef CounterReset < matlab.SystemUse the isOutputFixedSizeImpl method to specify that the output
is fixed
size.
methods (Access = protected)
function fixedout = isOutputFixedSizeImpl(~)
fixedout = true;
end
endView the method in the complete class definition file.
classdef CounterReset < matlab.System % CounterReset Count values above a threshold properties Threshold = 1 end properties (DiscreteState) Count end methods (Access = protected) function setupImpl(obj) obj.Count = 0; end function y = stepImpl(obj,u1,u2) % Add to count if u1 is above threshold % Reset if u2 is true if (u2) obj.Count = 0; elseif (any(u1 > obj.Threshold)) obj.Count = obj.Count + 1; end y = obj.Count; end function resetImpl(obj) obj.Count = 0; end function [sz,dt,cp] = getDiscreteStateSpecificationImpl(~,name) if strcmp(name,'Count') sz = [1 1]; dt = 'double'; cp = false; else error(['Error: Incorrect State Name: ', name.']); end end function dataout = getOutputDataTypeImpl(~) dataout = 'double'; end function sizeout = getOutputSizeImpl(~) sizeout = [1 1]; end function cplxout = isOutputComplexImpl(~) cplxout = false; end function fixedout = isOutputFixedSizeImpl(~) fixedout = true; end function flag = isInputSizeMutableImpl(~,idx) if idx == 1 flag = true; else flag = false; end end end end
Set Output Data Type
Specify the data type of a System object output using the getOutputDataTypeImpl method. A
second example shows how to specify a gain object with bus output. Use this
method when Simulink cannot infer the data type from the inputs during model
compilation or when you want different input and output data types. If you want
bus output, also use the getOutputDataTypeImpl method. To use
bus output, you must define the bus data type in the base workspace and you must
include the getOutputDataTypeImpl method in your class
definition file.
For both examples, subclass from the matlab.System base
class.
classdef DataTypeChange < matlab.SystemSpecify, in your class definition file, how to control the output data
type from a MATLAB
System block. Use the getOutputDataTypeImpl
method to change the output data type from double to single, or propagate
the input as a double. It also shows how to cast the data type to change the
output data type in the stepImpl method, if
necessary.
methods (Access = protected) function out = getOutputDataTypeImpl(obj) if obj.Quantize == true out = 'single'; else out = propagatedInputDataType(obj,1); end end end
classdef DataTypeChange < matlab.System properties(Nontunable) Quantize = false; end methods(Access = protected) function y = stepImpl(obj,u) if obj.Quantize == true % Cast for output data type to differ from input. y = single(u); else % Propagate output data type. y = u; end end function out = getOutputDataTypeImpl(obj) if obj.Quantize == true out = 'single'; else out = propagatedInputDataType(obj,1); end end end end
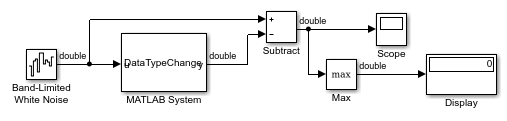
This model shows propagated double data type.
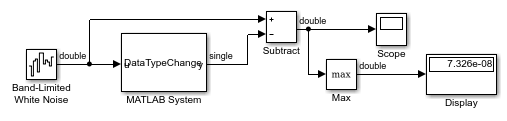
This model shows the result of changing the data type from double to single. The Display block shows the effect of quantizing the data.
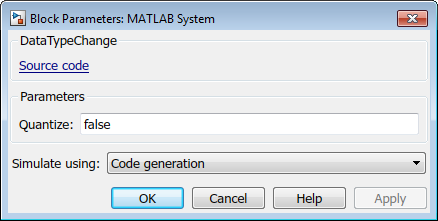
The block mask for the MATLAB System block includes an edit
field to switch between using propagation (Quantize =
false) and switching from double to single
(Quantize = true).
Use the getOutputDataTypeImpl method to specify the
output data type as a bus. Specify the bus name in a property.
properties(Nontunable) OutputBusName = 'bus_name'; end methods (Access = protected) function out = getOutputDataTypeImpl(obj) out = obj.OutputBusName; end end
View the method in the complete class definition file. This class definition file also includes code to implement a custom icon for this object in the MATLAB System block
classdef busGain < matlab.System % busGain Apply a gain of two to bus input. properties GainK = 2; end properties(Nontunable) OutputBusName = 'bus_name'; end methods (Access=protected) function out = stepImpl(obj,in) out.a = obj.GainK * in.a; out.b = obj.GainK * in.b; end function out = getOutputSizeImpl(obj) out = propagatedInputSize(obj, 1); end function out = isOutputComplexImpl(obj) out = propagatedInputComplexity(obj, 1); end function out = getOutputDataTypeImpl(obj) out = obj.OutputBusName; end function out = isOutputFixedSizeImpl(obj) out = propagatedInputFixedSize(obj,1); end end end
Set Output Complexity
Specify whether a System object output is complex or real using the
isOutputComplexImpl method. Use this method when
Simulink cannot infer the output complexity from the inputs during model
compilation.
Subclass from the matlab.System base class.
classdef CounterReset < matlab.SystemUse the isOutputComplexImpl method to specify that the
output is real.
methods (Access = protected) function cplxout = isOutputComplexImpl(~) cplxout = false; end end
View the method in the complete class definition file.
classdef CounterReset < matlab.System % CounterReset Count values above a threshold properties Threshold = 1 end properties (DiscreteState) Count end methods (Access = protected) function setupImpl(obj) obj.Count = 0; end function y = stepImpl(obj,u1,u2) % Add to count if u1 is above threshold % Reset if u2 is true if (u2) obj.Count = 0; elseif (any(u1 > obj.Threshold)) obj.Count = obj.Count + 1; end y = obj.Count; end function resetImpl(obj) obj.Count = 0; end function [sz,dt,cp] = getDiscreteStateSpecificationImpl(~,name) if strcmp(name,'Count') sz = [1 1]; dt = 'double'; cp = false; else error(['Error: Incorrect State Name: ', name.']); end end function dataout = getOutputDataTypeImpl(~) dataout = 'double'; end function sizeout = getOutputSizeImpl(~) sizeout = [1 1]; end function cplxout = isOutputComplexImpl(~) cplxout = false; end function fixedout = isOutputFixedSizeImpl(~) fixedout = true; end function flag = isInputSizeMutableImpl(~,idx) if idx == 1 flag = true; else flag = false; end end end end
Set Discrete State Output Specification
Specify the size, data type, and complexity of a discrete
state property using the getDiscreteStateSpecificationImpl
method. Use this method when your System object has a property with the DiscreteState attribute
and Simulink cannot infer the output specifications during model
compilation.
Subclass from the matlab.System base
class.
classdef CounterReset < matlab.SystemUse the getDiscreteStateSpecificationImpl method to specify the
size and data type. Also specify the complexity of a discrete state property
Count, which is used in the counter reset
example.
function [sz,dt,cp] = getDiscreteStateSpecificationImpl(~,name) if strcmp(name,'Count') sz = [1 1]; dt = 'double'; cp = false; else error(['Error: Incorrect State Name: ', name.']); end end
View the method in the complete class definition file.
classdef CounterReset < matlab.System % CounterReset Count values above a threshold properties Threshold = 1 end properties (DiscreteState) Count end methods (Access = protected) function setupImpl(obj) obj.Count = 0; end function y = stepImpl(obj,u1,u2) % Add to count if u1 is above threshold % Reset if u2 is true if (u2) obj.Count = 0; elseif (any(u1 > obj.Threshold)) obj.Count = obj.Count + 1; end y = obj.Count; end function resetImpl(obj) obj.Count = 0; end function [sz,dt,cp] = getDiscreteStateSpecificationImpl(~,name) if strcmp(name,'Count') sz = [1 1]; dt = 'double'; cp = false; else error(['Error: Incorrect State Name: ', name.']); end end function dataout = getOutputDataTypeImpl(~) dataout = 'double'; end function sizeout = getOutputSizeImpl(~) sizeout = [1 1]; end function cplxout = isOutputComplexImpl(~) cplxout = false; end function fixedout = isOutputFixedSizeImpl(~) fixedout = true; end function flag = isInputSizeMutableImpl(~,idx) if idx == 1 flag = true; else flag = false; end end end end
See Also
Functions
getDiscreteStateSpecificationImpl|getOutputDataTypeImpl|getOutputSizeImpl|isOutputComplexImpl|isOutputFixedSizeImpl