Set Up PX4 Firmware for Hardware-in-the-Loop (HITL) Simulation
The UAV Toolbox Support Package for PX4® Autopilots provides the option to deploy the controller on the PX4 Autopilot and verify the algorithm by running Hardware-in-the-Loop (HITL) simulation. The workflow is based on Hardware in the Loop Simulation (HITL).
Setting up PX4 Firmware
Perform these steps, which are a part of the Hardware Setup process in the UAV Toolbox Support Package for PX4 Autopilots, to enable the PX4 autopilot for HITL simulation.
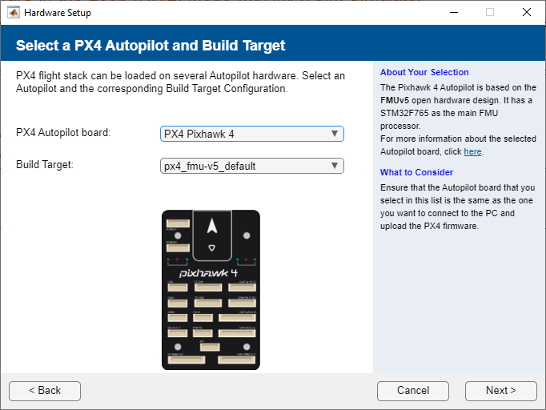
In the Select a PX4 Autopilot and Build Target Hardware Setup screen, select any Pixhawk® Series board as the Hardware board. For example, PX4 Pixhawk 4. Click Next.
Note
This feature supports only PX4 boards and does not support PX4 Host Target.
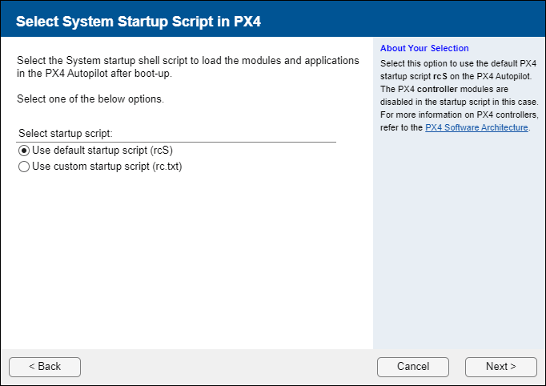
In the Select System Startup Script in PX4 Hardware Setup screen, select Use default startup script(rcS) and click Next.
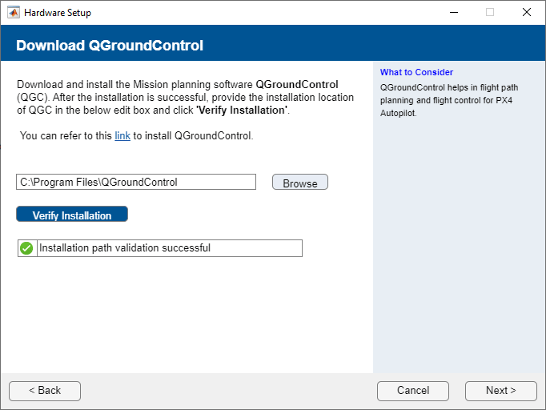
In the Download QGroundControl Hardware Setup screen, download and install QGC. After installation, click Verify Installation and then click Next
Proceed with the subsequent steps in the Hardware Setup process to build the firmware and verify that the build is successful.
See Also
Configure Simulink Model for Deployment in Hardware-in-the-Loop (HITL) Simulation | Configure Simulink Model for Monitor & Tune Simulation with Hardware-in-the-Loop (HITL)