
Aerospace
Learn how to use MATLAB and Simulink to design airplanes, unmanned aerial vehicles, and other aerospace vehicles for student projects. MathWorks experts and users share information on how to perform engineering design calculations, develop simulation models, and deploy code to hardware targets.
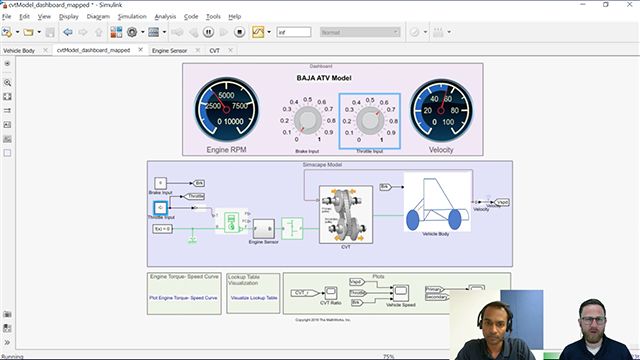
MATLAB and Simulink Racing Lounge
The MATLAB and Simulink Racing Lounge features a video series covering topics relevant to automotive student teams. Everything from the basics of MATLAB and Simulink to in-depth details on improving your racecar development is explored. Automotive student teams also share their keys to success with examples.
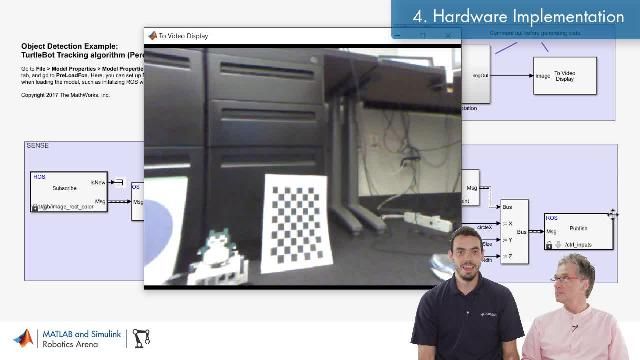


Mobile Robotics
Learn how to design and simulate common mobile robotics algorithms in MATLAB and Simulink, such as open- and closed-loop feedback control systems, for your robot to perform tasks like dead reckoning, line following, and obstacle detection. Use custom simulation tools to test algorithms within Simulink before deploying them to an actual robot.

Simscape Essentials for Automotive Student Teams
Get started with the fundamentals of vehicle development for student competitions like Formula Student using Simscape™. Create a basic vehicle model with brakes and simulate its behavior on a slope. Dive into electric powertrain modeling with a simplified battery model. Develop motor cooling model for automotive student competitions.


Hybrid Electric Vehicles
Learn to develop hybrid electric vehicle (HEV) systems using MATLAB and Simulink. Explore motor control design, and how to use equivalent circuits for representing the dynamic behavior of battery cells. Explore battery pack electro-thermal modeling and battery thermal management system design. Learn about modeling and simulating HEV systems, creating plant models, developing control systems, and optimizing your models.
Free Online Tutorials
Expand your knowledge through interactive courses, documentation, code examples, and how-to videos.
Student Lounge Blog
Get up to speed on student project best practices and teamwork.
Opportunities for Students






Puoi anche selezionare un sito web dal seguente elenco:
Americhe
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia-Pacifico
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)