plot
Plot collision configuration
Description
plot( plots the collision-checking
configuration of an ccConfig)InflationCollisionChecker object. Use
plot to visually verify that the circles in the configuration fully
enclose the vehicle.
plot(
specifies options using one or more ccConfig,Name,Value)Name,Value pair arguments. For
example, plot(ccConfig,'Ruler','Off') turns off the ruler that indicates
the locations of the circle centers.
Examples
Create a collision-checking configuration for a costmap. Manually specify the circle centers so that they fully enclose the vehicle.
Define the dimensions of a vehicle by using a vehicleDimensions object.
length = 5; % meters width = 2; % meters vehicleDims = vehicleDimensions(length,width);
Define three circle centers and the inflation radius to use for collision checking. Place one center at the vehicle's midpoint. Offset the other two centers by an equal amount on either end of the vehicle.
distFromSide = 0.175; centerPlacements = [distFromSide 0.5 1-distFromSide]; inflationRadius = 1.2;
Create and display the collision-checking configuration.
ccConfig = inflationCollisionChecker(vehicleDims, ... 'CenterPlacements',centerPlacements,'InflationRadius',inflationRadius); figure plot(ccConfig)
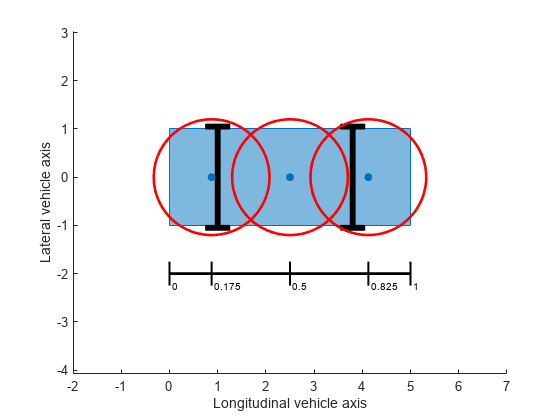
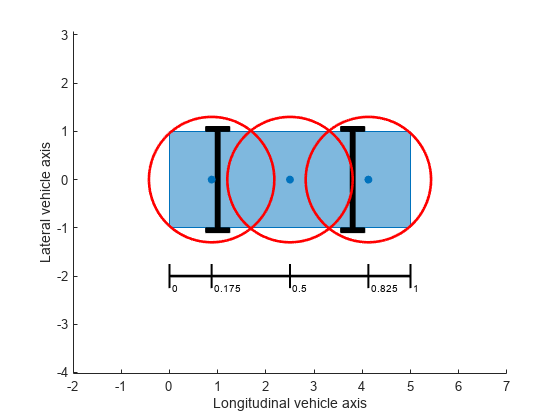
In this configuration, the corners of the vehicle are not enclosed within the circles. To fully enclose the vehicle, increase the inflation radius. Display the updated configuration.
ccConfig.InflationRadius = 1.3; plot(ccConfig)
Use this collision-checking configuration to create a 10-by-20 meter costmap.
costmap = vehicleCostmap(10,20,0.1,'CollisionChecker',ccConfig);Input Arguments
Name-Value Arguments
Version History
Introduced in R2018b