Buffer
Buffer input sequence to smaller or larger frame size
To buffer input data into integer multiple frame sizes, use the N-Ratio Buffer block instead of the Buffer block. The N-Ratio Buffer block has lower latency and optimizes the memory used in the generated code for an Mi to kMi frame conversion, where k is the ratio of the output frame length to the input frame length.

Libraries:
DSP System Toolbox /
Signal Management /
Buffers
Description
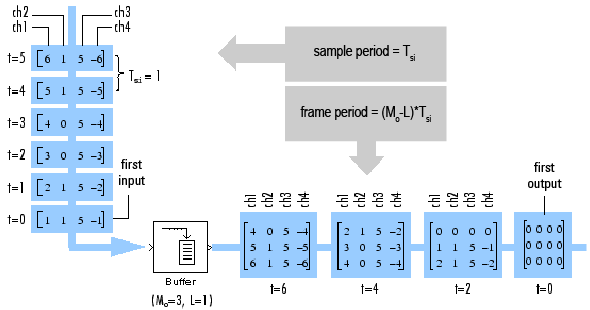
The Buffer block always performs frame-based processing. The block redistributes the data in each column of the input to produce an output with a different frame size. Buffering a signal to a larger frame size yields an output with a slower frame rate than the input. For example, consider this illustration for a scalar input.

Buffering a signal to a smaller frame size yields an output with a faster frame rate than the input. For example, consider this illustration of a scalar output.

The block coordinates the output frame size and frame rate of nonoverlapping buffers such that the sample period of the signal is the same at both the input and output: Tso = Tsi.
This block supports triggered subsystems when the block input and output rates are the same.
Examples

Streaming Power Spectrum Estimation Using Welch's Method
Use Welch's method of averaged modified periodogram to estimate power spectrum.
Buffering Input with Overlap
Buffer a two-channel input using an Output buffer size of three and four and a Buffer overlap of one.

Compute Mean Using Sliding Window
Model a sliding window using the Buffer block. The Mean block use this window to compute the mean.
Ports
Input
To buffer single-channel signals, input a scalar or column vector. To buffer multichannel signals, input a row vector or matrix. To buffer single-channel signals, input a scalar or column vector of the size Mi-by-1, where Mi is the input frame size.
Data Types: single | double | int8 | int16 | int32 | uint8 | uint16 | uint32 | Boolean | fixed point
Complex Number Support: Yes
Output
The buffered input signal returned as a vector or a matrix.
When the input is a single-channel signal:
1-by-1 (scalar) — Output is an Mo-by-1 vector.
Mi-by-1 (column vector) — Output is an Mo-by-1 vector.
where
Mi — Input frame size
Mo — Value of the Output buffer size parameter
The input frame period is Mi · Tsi, where Tsi is the input sample period. The output frame period is , where L is the value of the Buffer overlap parameter and Tsi is the input sample period. When you set the Buffer overlap parameter to Mo – 1, the output frame period equals the input sample period.
When the input is a multichannel signal:
1-by-N — Output is an Mo-by-N matrix.
Mi-by-N — Output is an Mo-by-N matrix.
where
N — Number of channels in the signal
Mi — Input frame period
Mo is the value of the Output buffer size parameter and can be greater or less than the input frame size, Mi. The block buffers each of the N input channels independently.
The input frame period is Mi · Tsi. The output frame period is , which equals the sequence sample period when the Buffer overlap is . Thus, the output sample period Tso is related to the input sample period Tsi by
The output has the same data type and complexity as the input
Data Types: single | double | int8 | int16 | int32 | uint8 | uint16 | uint32 | Boolean | fixed point
Complex Number Support: Yes
Parameters
Specify the number of consecutive samples, Mo, from each channel to buffer into the output frame.
Data Types: double | int8 | int16 | int32 | uint8 | uint16 | uint32
Specify the number of samples, L, which specifies the amount of overlap or underlap in each successive output frame.
To overlap the data in the buffer, specify a value of L in the range , where Mo is the value of the Output buffer size parameter. The block takes L samples (rows) from the current output and repeats them in the next output. In cases of overlap, the block acquires new input samples before propagating the buffered data to the output.
When , you are buffering the signal with underlap. The block discards L input samples after the buffer fills and outputs the buffer with period , which is longer than in the zero-overlap case.
The output frame period is , which equals the input sequence sample period, Tsi, when the Buffer overlap is .
Data Types: double | int8 | int16 | int32 | uint8 | uint16 | uint32
Specify the value of the block's initial output, in cases of nonzero latency, as a scalar, vector, or matrix.
For all cases of single-tasking operation other than those listed in Zero-Tasking Latency, the Buffer block's buffer is initialized to the value(s) specified by the Initial conditions parameter. The block reads from this buffer to generate the first D output samples, where
The dimensions of the Initial conditions parameter depend on the Buffer overlap, L, and whether the input is single-channel or multichannel:
When , the Initial conditions parameter must be a scalar.
When , the Initial conditions parameter can be a scalar, or it can be a vector with either of these constraints:
For single-channel inputs, the Initial conditions parameter can be a vector of length Mo if Mi is 1, or a vector of length Mi if Mo is 1.
For multichannel inputs, the Initial conditions parameter can be a vector of length Mo * N if Mi is 1, or a vector of length Mi * N if Mo is 1.
For all multitasking operations, use the rebuffer_delay function
to compute the exact delay in samples that the Buffer block introduces
for a given combination of buffer size and buffer overlap.
For general buffering between arbitrary frame sizes, the Initial conditions parameter must be a scalar, which is then repeated across all elements of the initial output(s). However, in the special case where the input is a 1-by-N row vector, and the output of the block is an Mo-by-N matrix, Initial conditions can be:
An Mo-by-N matrix
A length-Mo vector to be repeated across all columns of the initial output(s)
A scalar to be repeated across all elements of the initial output(s)
In the special case where the output is a 1-by-N row vector, which is the result of unbuffering an Mi-by-N matrix, the Initial conditions can be:
A vector containing Mi samples to output sequentially for each channel during the first Mi sample times
A scalar to be repeated across all elements of the initial output(s)
For more information on latency and the Simulink® tasking modes, see Excess Algorithmic Delay (Tasking Latency) and Time-Based Scheduling and Code Generation (Simulink Coder).
Data Types: single | double | int8 | int16 | int32 | uint8 | uint16 | uint32 | Boolean | fixed point
Complex Number Support: Yes
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
More About
Zero-tasking latency means that the first input sample, received at t = 0, appears as the first output sample. In the Simulink single-tasking mode, the Buffer block has zero-tasking latency for these special cases:
Scalar input and output () with zero or negative Buffer overlap ()
Input frame size is an integer multiple of the output frame size
where k is an integer with zero Buffer overlap (); notable cases of this include:
Any input frame size Mi with scalar output () and zero Buffer overlap ()
Equal input and output frame sizes () with zero Buffer overlap ()
The Buffer block cannot be used in an enabled subsystem under the following conditions:
In a multirate, multitasking environment
When the Buffer overlap parameter is set to a negative value
The Buffer block has an internal reservoir that temporarily stores data. When the Buffer block is used in an enabled subsystem, there is the possibility that the reservoir can overrun or underrun. The block implements safeguards against these occurrences.
Overrun occurs when more data enters the buffer than what it can hold. For example, consider buffering a scalar input to a frame of size three with a buffer that accepts an input every second and outputs every three seconds. If you place this buffer inside an enabled subsystem that is disabled every three seconds at t = 3s, t = 6s, and so on, the buffer accumulates data in its internal reservoir without being able to empty it. This condition results in an overrun.
Underrun occurs when the buffer runs out of data to output. For example, again consider buffering a scalar input to a frame size of three with a buffer that accepts an input every second and outputs every three seconds. If you place this buffer inside an enabled subsystem that is disabled at t = 10s, t = 11s, t = 13s, t = 14s, t = 16s, and t = 17s, its internal reservoir becomes drained, and there is no data to output at t = 18s. This condition results in an underrun.
To protect from an overrun or an underrun, the Buffer block keeps a record of the amount of data in its internal reservoir. When the Buffer block reads data, the amount of data in its reservoir goes up. When the Buffer block outputs the data, the amount of data in its reservoir goes down. To protect from overrun, the oldest samples in the reservoir are discarded whenever the amount of data in the reservoir is larger than the actual buffer size. To protect from underrun, the most recent samples are repeated whenever an output is due and there is no data in the reservoir.
Extended Capabilities
The Buffer block supports code generation for Simulink
Real-Time™. The code generated for
this target is executed concurrently. To generate this code, set the system
target file of the model to speedgoat.tlc or to any
other target file supported by Simulink
Real-Time. The Buffer block also needs to satisfy certain
conditions.
To set the system target file:
In the Simulink model window, in the Modeling tab, click Model Settings.
In the Model Settings > Code Generation pane, set the System target file to
speedgoat.tlcor to any other target file supported by Simulink Real-Time.
In addition, the Buffer block must satisfy the following conditions:
Ratio between output and input buffer size must be a pure integer, that is 1/N or N/1. Ratios such as 3/12, 1/7, 7/1, or 2/4 are all valid ratios. In the Buffer block, you can specify the appropriate output buffer size using the Output buffer size (per channel) parameter.
There should be no overlap between frames. In the Buffer block, set the Buffer overlap parameter to
0.
Version History
Introduced before R2006aThe Buffer block does not support multicore concurrent execution for code generated from it for any target other than a Simulink Real-Time target. For more information, see the Code Generation section.
Starting in R2023a, if you do not set the target to Simulink Real-Time and you allow multicore concurrent execution by selecting the Allow tasks to execute concurrently on target parameter in the Solver pane of the Simulink model settings, the Buffer block throws an error when you run or generate code from a model containing the block.
See Also
Functions
Blocks
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Seleziona un sito web
Seleziona un sito web per visualizzare contenuto tradotto dove disponibile e vedere eventi e offerte locali. In base alla tua area geografica, ti consigliamo di selezionare: .
Puoi anche selezionare un sito web dal seguente elenco:
Come ottenere le migliori prestazioni del sito
Per ottenere le migliori prestazioni del sito, seleziona il sito cinese (in cinese o in inglese). I siti MathWorks per gli altri paesi non sono ottimizzati per essere visitati dalla tua area geografica.
Americhe
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)