iirlpnormc
Constrained least Pth-norm optimal IIR filter
Syntax
[num,den] = iirlpnormc(n,d,f,edges,a)
[num,den] = iirlpnormc(n,d,f,edges,a,w)
[num,den] = iirlpnormc(n,d,f,edges,a,w,radius)
[num,den] = iirlpnormc(n,d,f,edges,a,w,radius,p)
[num,den] = iirlpnormc(n,d,f,edges,a,w,radius,p,dens)
[num,den] = iirlpnormc(n,d,f,edges,a,w,radius,p,dens,initnum,initden)
[num,den,err] = iirlpnormc(...)
[num,den,err,sos,g] = iirlpnormc(...)
Description
[num,den] = iirlpnormc(n,d,f,edges,a) returns a
filter having numerator order n and denominator order
d which is the best approximation to the desired frequency
response described by f and a in the least-pth
sense. The vector edges specifies the band-edge frequencies for
multi-band designs. A constrained Newton-type algorithm is employed.
n and d should be chosen so that the zeros and
poles are used effectively. See the Hints section. Always check
the resulting filter using zplane.
[num,den] = iirlpnormc(n,d,f,edges,a,w) uses
the weights in w to weight the error. w has
one entry per frequency point (the same length as f and a)
which tells iirlpnormc how much emphasis to put
on minimizing the error in the vicinity of each frequency point relative
to the other points. f and a must
have the same number of elements, which can exceed the number of elements
in edges. This allows for the specification of
filters having any gain contour within each band. The frequencies
specified in edges must also appear in the vector f.
For example,
[num,den] = iirlpnormc(5,5,[0 .15 .4 .5 1],[0 .4 .5 1],... [1 1.6 1 0 0],[1 1 1 10 10])
designs a lowpass filter with a peak of 1.6 within the passband.
[num,den] = iirlpnormc(n,d,f,edges,a,w,radius) returns
a filter having a maximum pole radius of radius where
0<radius<1. radius defaults
to 0.999999. Filters that have a reduced pole radius may retain better
transfer function accuracy after you quantize them.
[num,den] = iirlpnormc(n,d,f,edges,a,w,radius,p) where p is
a two-element vector [pmin pmax] allows for the
specification of the minimum and maximum values of p used
in the least-pth algorithm. Default is [2 128] which essentially yields
the L-infinity, or Chebyshev, norm. pmin and pmax should
be even. If p is 'inspect',
no optimization will occur. This can be used to inspect the initial
pole/zero placement.
[num,den] = iirlpnormc(n,d,f,edges,a,w,radius,p,dens) specifies
the grid density dens used in the optimization.
The number of grid points is (dens*(n+d+1)). The
default is 20. dens can be specified as a single-element
cell array. The grid is not equally spaced.
[num,den] = iirlpnormc(n,d,f,edges,a,w,radius,p,dens,initnum,initden) allows
for the specification of the initial estimate of the filter numerator
and denominator coefficients in vectors initnum and initden.
This may be useful for difficult optimization problems. The pole-zero
editor in Signal Processing Toolbox™ software can be used for generating initnum and initden.
[num,den,err] = iirlpnormc(...) returns
the least-Pth approximation error err.
[num,den,err,sos,g] = iirlpnormc(...) returns
the second-order section representation in the matrix SOS and gain
G. For numerical reasons you may find SOS and G beneficial in some
cases.
Hints
This is a weighted least-pth optimization.
Check the radii and location of the resulting poles and zeros.
If the zeros are all on the unit circle and the poles are well inside of the unit circle, try increasing the order of the numerator or reducing the error weighting in the stopband.
Similarly, if several poles have a large radius and the zeros are well inside of the unit circle, try increasing the order of the denominator or reducing the error weight in the passband.
If you reduce the pole radius, you might need to increase the order of the denominator.
The message
Poorly conditioned matrix. See the "help" file.
indicates that iirlpnormc cannot accurately
compute the optimization because either:
The approximation error is extremely small (try reducing the number of poles or zeros — refer to the hints above).
The filter specifications have huge variation, such as
a=[1 1e9 0 0].
Examples
This example returns a lowpass filter whose pole radius is constrained to 0.8.
[b,a,err,s,g] = iirlpnormc(6,6,[0 .4 .5 1],[0 .4 .5 1],... [1 1 0 0],[1 1 1 1],.8); freqz(b,a);
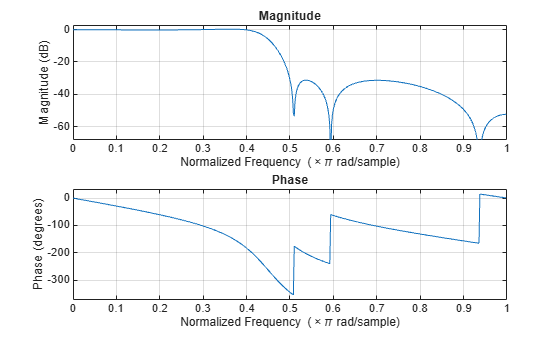
The magnitude response shows the lowpass nature of the filter. The pole/zero plot following shows that the poles are constrained to 0.8 as specified in the command.
zplane(b,a)

References
[1] Antoniou, A., Digital Filters: Analysis, Design, and Applications, Second Edition, McGraw-Hill, Inc. 1993.
Extended Capabilities
Version History
Introduced in R2011a