IMU Filter
Libraries:
Navigation Toolbox /
Multisensor Positioning /
Navigation Filters
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Navigation Filters
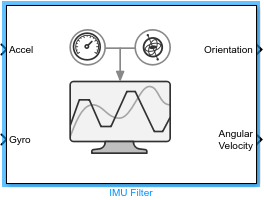
Description
The IMU Filter Simulink® block fuses accelerometer and gyroscope sensor data to estimate device orientation.
Examples
Compute Orientation from Recorded IMU Data
Load the rpy_9axis file into the workspace. The file contains recorded accelerometer, gyroscope, and magnetometer sensor data from a device oscillating in pitch (around the y-axis), then yaw (around the z-axis), and then roll (around the x-axis). The file also contains the sample rate of the recording.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2023b