Kalman Filter
Estimate states of discrete-time or continuous-time linear system
Libraries:
Control System Toolbox /
State Estimation
System Identification Toolbox /
Estimators
Description
Use the Kalman Filter block to estimate states of a state-space plant model given process and measurement noise covariance data. The state-space model can be time-varying. A steady-state Kalman filter implementation is used if the state-space model and noise covariance matrices are all time-invariant, and a time-varying Kalman filter is used otherwise.
A Kalman filter provides the optimal solution to the continuous or discrete estimation problems in Continuous-Time Estimation and Discrete-Time Estimation.
The Kalman Filter block differs from the kalman (Control System Toolbox) command in the following ways:
When you call
kalman(sys,...), it assumes thatsysincludes theGandHmatrices. Specifically,sys.Bis of the form[B G]andsys.Dis of the form[D H]. When you provide a LTI variable to the Kalman Filter block, it does not assume that the LTI variable provided containsGandH. They are optional and separate.The filter created by the
kalmancommand outputs[yhat;xhat]by default. The block outputs onlyxhatby default.The
Kalmancommand can output bothPandZcovariance matrices for discrete-time systems. The block can only outputPorZfor such systems.
Examples
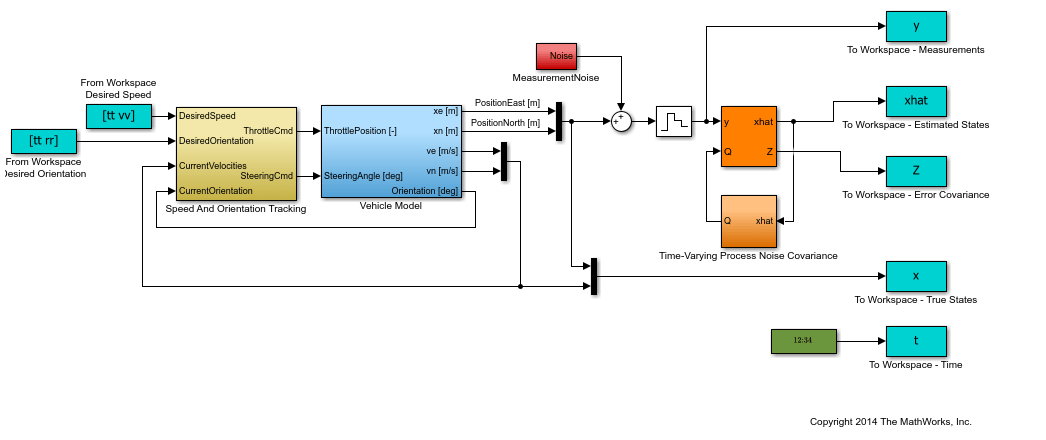
State Estimation Using Time-Varying Kalman Filter
Estimate states of linear systems using time-varying Kalman filters in Simulink®.
Limitations
The plant and noise data must satisfy these constraints:
(C,A) is detectable.
and .
has no uncontrollable mode on the imaginary axis (or unit circle in discrete time), where
The continuous-time Kalman filter cannot be used in Function-Call Subsystems or Triggered Subsystems.
Ports
Input
Known inputs u(t) or
u[k].
Dependencies
To enable this port, select the Add input port u parameter. This parameter is selected by default.
Measured output y[n] to update the estimated
states.
n-by-n state (or system) matrix.
Dependencies
To enable this port, set the Model source parameter to Input Port.
n-by-p input matrix.
Dependencies
To enable this port, set the Model source parameter to Input Port and select the Add input port u parameter.
q-by-p output matrix.
Dependencies
To enable this port, set the Model source parameter to Input Port.
q-by-p feedthrough (or feedforward) matrix. In cases where the system model does not have a direct feedthrough, D is the zero matrix.
Dependencies
To enable this port, set the Model source parameter to Input Port and select the Add input port u parameter.
Noise transformation in the state-space equation.
Dependencies
To enable this port, select Use G and H matrices (default G=I and H=0) parameter.
Noise transformation in the state-space equation.
Dependencies
To enable this port, select Use G and H matrices (default G=I and H=0) parameter.
Process noise covariance matrix, specified as one of the following:
Real nonnegative scalar. Q is an Nw-by-Nw diagonal matrix with the scalar on the diagonals. Nw is the number of process noise inputs in the model.
Vector of real nonnegative scalars. Q is an Nw-by-Nw diagonal matrix with the elements of the vector on the diagonals of Q.
Nw-by-Nw positive semi-definite matrix.
Dependencies
To enable this port, deselect the Time-invariant Q parameter.
Measurement noise covariance matrix, specified as one of the following:
Real positive scalar. R is an Ny-by-Ny diagonal matrix with the scalar on the diagonals. Ny is the number of measured outputs in the model.
Vector of real positive scalars. R is an Ny-by-Ny diagonal matrix with the elements of the vector on the diagonals of R.
Ny-by-Ny positive-definite matrix.
Dependencies
To enable this port, deselect the Time-invariant R parameter.
Process and measurement noise cross-covariance matrix, specified as a Nw-by-Ny matrix. The matrix [Q N; NT R] must be positive definite.
Dependencies
To enable this port, deselect the Time-invariant N parameter.
P matrix at the initial time.
Dependencies
To enable this port, set the Model source parameter to Input Port and set the Source parameter to Input Port.
Estimated states at the initial time.
Dependencies
To enable this port, set the Source parameter to Input Port.
This port controls the measurement updates and takes a scalar signal.
Dependencies
To enable this port, select Add input port Enable to control measurement updates parameter.
Control signal to reset estimated states and the parameter covariance matrix using specified initial values. See External Reset for more information on when a reset is triggered.
Dependencies
To enable this port, set the External reset parameter to any value other than None.
Output
Estimated states of the linear system.
Estimated outputs of the linear system.
Dependencies
To enable this port, select Output estimated model output y parameter.
Add Z output port to the block.
To enable this port, select Output state estimation error covariance Z parameter.
Dependencies
To enable this port, set the Time domain parameter to Discrete-Time and select Use the current measurement y[n] to improve xhat[n] parameter.
Add P output port to the block.
To enable this port, select Output state estimation error covariance P parameter.
Dependencies
To enable this port, set the Time domain parameter to Continuous-Time or set the Time domain parameter to Discrete-Time and deselect Use the current measurement y[n] to improve xhat[n] parameter.
Note
All input ports except Enable and Reset must have the same data type (single or double).
Enable and Reset ports support
single,double,int8,uint8,int16,uint16,int32,uint32, and boolean data types.
Parameters
Filter Settings
Discrete-Time(default) — Block estimates discrete-time states.Continuous-Time— Block estimates continuous-time states.When the Kalman Filter block is in a model with synchronous state control (see the State Control (HDL Coder) block), you cannot select Continuous-Time.
Programmatic Use
Block Parameter:
TimeDomain |
| Type: string, character vector |
Values:
"Discrete-Time" |
"Continuous-Time" |
Default:
"Discrete-Time" |
Use the current estimator variant of the discrete-time Kalman filter. When this parameter is not selected, the delayed estimator (variant) is used.
This parameter is available only when Time domain is Discrete-Time.
Programmatic Use
Block Parameter:
UseCurrentEstimator |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"on" |
Block sample time, specified as -1 or a positive
scalar.
The default value is -1, which implies that the
block inherits its sample time based on the context of the block within
the model. All block input ports must have the same sample time.
Dependencies
This parameter is available only when Time domain is Discrete-Time and Model source is Individual A, B, C, D matrices or Input port. When Model source is LTI State-Space Variable, the block takes its sample time from the LTI state-space variable.
Programmatic Use
Block Parameter:
Ts |
| Type: string, character vector |
Values:
"-1" | scalar |
Default:
"-1" |
Model Parameters
System Model
LTI State-Space Variable— Use the model specified in Variable. The default value isss(0.95,1,1,0). The sample time of the model must match the Time domain parameter; that is, the model must be discrete-time if Time domain is discrete-time.Individual A, B, C, D matrices— Specify the A, B, C, and D in the block parameters.Input port— Specify the A, B, C, D matrices as input signals to the Kalman Filter block. If you select this option, the block includes additional input ports A, B, C, D. You must also specify Number of states, Number of inputs, and Number of outputs in the block parameters.
Programmatic Use
Block Parameter:
ModelSource |
| Type: string, character vector |
Values:
"LTI State-Space Variable" |
"Individual A, B, C, D matrices" |
"Input port" |
Default:
"LTI State-Space Variable" |
Specify the A matrix. It must be real and square.
The default value is 0.95.
Dependencies
To enable this port, set the Model source parameter to Individual A, B, C, D matrices.
Programmatic Use
Block Parameter:
A |
| Type: string, character vector |
Values:
"real matrix" |
Default:
"0.95" |
Specify the B matrix. It must be real and have as
many rows as the A matrix. The default value is
1.
Dependencies
To enable this port, set the Model source parameter to Individual A, B, C, D matrices.
Programmatic Use
Block Parameter:
B |
| Type: string, character vector |
Values:
"real matrix" |
Default:
"1" |
Specify the C matrix. It must be real and have as
many columns as the A matrix. The default value is
1.
Dependencies
To enable this port, set the Model source parameter to Individual A, B, C, D matrices.
Programmatic Use
Block Parameter:
C |
| Type: string, character vector |
Values:
"real matrix" |
Default:
"1" |
Specify the D matrix. It must be real and must
have as many rows as the C matrix and as many
columns as the B matrix. The default value is
0.
Dependencies
To enable this port, set the Model source parameter to Individual A, B, C, D matrices.
Programmatic Use
Block Parameter:
D |
| Type: string, character vector |
Values:
"real matrix" |
Default:
"0" |
Number of states to be estimated, specified as a positive integer. The
default value is 1.
Dependencies
To enable this port, set the Model source parameter to Input port.
Programmatic Use
Block Parameter:
NumberOfStates |
| Type: string, character vector |
Values:
"1" | scalar |
Default:
"1" |
Number of known inputs in the model, specified as a positive integer.
The default value is 1.
Dependencies
To enable this port, set the Model source parameter to Input port.
Programmatic Use
Block Parameter:
NumberOfInputs |
| Type: string, character vector |
Values:
"1" | scalar |
Default:
"1" |
Number of measured outputs in the model, specified as a positive
integer. The default value is 1.
Dependencies
To enable this port, set the Model source parameter to Input port.
Programmatic Use
Block Parameter:
NumberOfOutputs |
| Type: string, character vector |
Values:"1" |
scalar |
Default:
"1" |
Initial Estimates
Dialog— Specify the values directly in the dialog boxes.Input port— Inherit the values from input ports. The default is10. The block includes an additional input port X0. A second additional input port P0 is added when time-varying Kalman filter is used. X0 and P0 must satisfy the same conditions as the parameters Initial states x[0] and State estimation error covariance P[0], respectively.
Programmatic Use
Block Parameter:
InitialEstimateSource |
| Type: string, character vector |
Values:
"Dialog" | "Input
port" |
Default:
"Dialog" |
Specify the initial state estimate as a real scalar or vector. If you
specify a scalar, all initial state estimates are set to this scalar. If
you specify a vector, the length of the vector must match with the
number of states in the model. The default is
0.
Dependencies
To enable this port, set the Source parameter to Dialog.
Programmatic Use
Block Parameter:
X0 |
| Type: string, character vector |
Values:
"0" | scalar |
vector |
Default:
"0" |
Specify the initial state estimation error covariance P[0] for a discrete-time Kalman filter or P(0) for continuous-time. This parameter must be specified as one of the following:
Real nonnegative scalar. P is an Ns-by-Ns diagonal matrix with the scalar on the diagonals. Ns is the number of states in the model.
Vector of real nonnegative scalars. P is an Ns-by-Ns diagonal matrix with the elements of the vector on the diagonals of P.
Ns-by-Ns positive semi-definite matrix.
Dependencies
To enable this port, set the Model source parameter to Input port and Source parameter to Dialog.
Programmatic Use
Block Parameter:
P0 |
| Type: string, character vector |
Values:
"10" | scalar |
vector |
matrix |
Default:
"10" |
Noise Characteristics
Specify whether to use the pre-identified Kalman Gain present in the state-space model specified by Variable.
Dependencies
To enable this parameter, you must meet the following conditions:
The Model source is set to LTI State-Space Variable and Variable is an identified state-space model (
idss) with a nonzero K matrix.Select the Time Invariant Q, Time Invariant R, and Time Invariant N parameters.
If the Use G and H matrices (default G=I and H=0) parameter is selected, the Time Invariant G and Time Invariant H parameters must also be selected.
Programmatic Use
Block Parameter:
UseK |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
By default G=I and H=0. If you
select this option, you must specify G and
H parameter.
Programmatic Use
Block Parameter:
UseGH |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
It must be a real matrix with as many rows as the
A matrix. The default value is
1.
Dependencies
To enable this parameter, select Use G and H matrices (default G=I and H=0) parameter.
Programmatic Use
Block Parameter:
G |
| Type: string, character vector |
| Values: scalar | vector | matrix |
Default:
"1" |
If you clear this option, the block includes an additional input port G.
Programmatic Use
Block Parameter:
TimeInvariantG |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"on" |
It must be a real matrix with as many rows as the
C matrix and as many columns as the
G matrix. The default value is
0.
Dependencies
To enable this parameter, select Use G and H matrices (default G=I and H=0) parameter.
Programmatic Use
Block Parameter:
H |
| Type: string, character vector |
| Values: scalar | vector | matrix |
Default:
"0" |
If you clear this option, the block includes an additional input port H.
Programmatic Use
Block Parameter:
TimeInvariantH |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"on" |
Specify the number of process noise inputs in the model. The default
value is 1.
Dependencies
This parameter is available only when Time-invariant G and Time-invariant H are deselected. Otherwise, this information is inferred from the G or H matrix.
Programmatic Use
Block Parameter:
NumberOfProcessNoiseInputs |
| Type: string, character vector |
| Values: scalar |
Default:
"1" |
Specified as one of the following:
Real nonnegative scalar. Q is an Nw-by-Nw diagonal matrix with the scalar on the diagonals. Nw is the number of process noise inputs in the model.
Vector of real nonnegative scalars. Q is an Nw-by-Nw diagonal matrix with the elements of the vector on the diagonals of Q.
Nw-by-Nw positive semi-definite matrix.
Dependencies
To enable this parameter, select the Time-invariant Q parameter.
Programmatic Use
Block Parameter:
Q |
| Type: string, character vector |
| Values: scalar | vector | matrix |
Default:
"0.05" |
If you deselect this parameter, the block includes an additional input port Q.
Programmatic Use
Block Parameter:
TimeInvariantQ |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"on" |
Specified as one of the following:
Real positive scalar. R is an Ny-by-Ny diagonal matrix with the scalar on the diagonals. Ny is the number of measured outputs in the model.
Vector of real positive scalars. R is an Ny-by-Ny diagonal matrix with the elements of the vector on the diagonals of R.
Ny-by-Ny positive-definite matrix.
Dependencies
To enable this parameter, select the Time-invariant R parameter.
Programmatic Use
Block Parameter:
R |
| Type: string, character vector |
| Values: scalar | vector | matrix |
Default:
"1" |
If you deselect this parameter, the block includes an additional input port R.
Programmatic Use
Block Parameter:
TimeInvariantR |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"on" |
Specify this parameter as a Nw-by-Ny matrix. The matrix [Q N; NT R] must be positive definite.
Dependencies
To enable this parameter, select the Time-invariant N parameter.
Programmatic Use
Block Parameter:
N |
| Type: string, character vector |
| Values: scalar | vector | matrix |
Default:
"0" |
If you deselect this parameter, the block includes an additional input port N.
Programmatic Use
Block Parameter:
TimeInvariantN |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"on" |
Options
Additional Inports
Select this option if your model contains known inputs
u(t) or u[k]. The parameter is
selected by default. Deselecting this parameter removes the input port
u from the block and removes the
B, D and Number
of inputs parameters from the block dialog box.
Programmatic Use
Block Parameter:
AddInputPort |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"on" |
Select this option if you want to control the measurement updates. The block includes an additional inport Enable. The Enable input port takes a scalar signal. This parameter is not selected by default.
By default the block does measurement updates at each time step to
improve the state and output estimates and based on measured outputs. The measurement update is
skipped for the current sample time when the signal in the
Enable port is 0.
Concretely, the equation for state estimates become for a continuous-time Kalman filter and for discrete-time.
Note
Enabling the Enable port allows measurement updates to be controlled. By default, Kalman Filter does the measurement updates.
Programmatic Use
Block Parameter:
AddEnablePort |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
This parameter helps control when the block is reset. Suppose you
reset the block at a time step, t. If the block is
enabled at t, the software uses the initial parameter
values specified either in the block dialog box or the input ports
P0 and X0 to estimate the
states. In other words, at t, the block performs a
time update and, if it is enabled, a measurement update after the reset.
The block outputs these updated estimates.
Specify one of the following:
None(Default) — Estimated states and state estimation error covariance matrix P values are not reset.Rising— Triggers a reset when the control signal rises from a negative or zero value to a positive value. If the initial value is negative, rising to zero triggers a reset.Falling— Triggers a reset when the control signal falls from a positive or zero value to a negative value. If the initial value is positive, falling to zero triggers a reset.Either— Triggers a reset when the control signal is either rising or falling.Level— Triggers a reset in either of these cases:The control signal is nonzero at the current time step.
The control signal changes from nonzero at the previous time step to zero at the current time step.
Level hold— Triggers reset when the control signal is nonzero at the current time step.
When you choose an option other than None,
a Reset input port is added to the block to provide
the reset control input signal.
Programmatic Use
Block Parameter:
ExternalReset |
| Type: string, character vector |
Values:
"None" | "Rising" |
"Falling" | "Either" |
"Level" | "Level
hold" |
Default:
"None" |
Additional Outports
Add a output port to the block to output the estimated model outputs. The parameter is not selected by default.
Programmatic Use
Block Parameter:
OutputEstimatedY |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
Add a Z output port to the block. The Z matrix is provided only when Time domain is Discrete-Time and the Use the current measurement y[n] to improve xhat[n] parameter is selected. Otherwise, the P matrix, as described in the Algorithms section, is provided.
This parameter is not selected by default.
Programmatic Use
Block Parameter:
OutputZ |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
Add a P output port to the block. This parameter is not selected by default.
Dependencies
To enable this port, set the Time domain parameter to Continuous-Time or set the Time domain parameter to Discrete-Time and deselect Use the current measurement y[n] to improve xhat[n] parameter.
Programmatic Use
Block Parameter:
OutputP |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
Algorithms
Given the continuous plant
with known inputs u, white process noise w, and white measurement noise v satisfying
construct a state estimate that minimizes the state estimation error covariance .
The optimal solution is the Kalman filter with equations
where
The Kalman filter uses known inputs u and measurements y to generate state estimates . If you want, the block can also output the estimates of the true plant output .

The block implements the steady-state Kalman filter when the system matrices
(A(t), B(t), C(t),
D(t), G(t), H(t)) and
noise covariance matrices (Q(t), R(t),
N(t)) are constant (specified in the Block Parameters dialog
box). The steady-state Kalman filter uses a constant matrix P
that minimizes the steady-state estimation error covariance and solves the
associated continuous-time algebraic Riccati equation:
Consider the discrete plant
with known inputs u, white process noise w, and white measurement noise v satisfying
The estimator has the following state equation
where the gain L[n] is calculated through the discrete Riccati
equation:
where I is the identity matrix of appropriate size and
The steady-state Kalman filter uses a constant matrix P that
minimizes the steady-state estimation error covariance and solves the associated
discrete-time algebraic Riccati equation.
There are two variants of discrete-time Kalman filters:
The current estimator generates the state estimates using all measurements available, including y[n]. The filter updates with y[n] and outputs:
The delayed estimator generates the state estimates using measurements up to y[n –1]. The filter outputs as defined previously, along with the optional output
The current estimator has better estimation accuracy than the delayed estimator, which is important for slow sample times. However, it has a higher computational cost, so implementing it inside control loops is harder. More specifically, it has direct feedthrough which leads to an algebraic loop if the Kalman filter is used in a feedback loop that does not contain any delays (the feedback loop itself also has direct feedthrough). This algebraic loop can impact the speed of simulation, and you cannot generate code if your model contains algebraic loops.
References
[1] Franklin, Gene F., J. David Powell, and Michael L. Workman. Digital Control of Dynamic Systems. 2nd ed. Reading, Mass: Addison-Wesley, 1990.
[2] Lewis, Frank L. Optimal Estimation: With an Introduction to Stochastic Control Theory. New York: Wiley, 1986.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
PLC Code Generation
Generate Structured Text code using Simulink® PLC Coder™.
Version History
Introduced in R2014bStarting in 2021a, numerical improvements in the algorithms used by the Kalman Filter block might produce results that are different from the results you obtained using previous versions.
See Also
Functions
kalman(Control System Toolbox) |extendedKalmanFilter|unscentedKalmanFilter|particleFilter
Blocks
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Seleziona un sito web
Seleziona un sito web per visualizzare contenuto tradotto dove disponibile e vedere eventi e offerte locali. In base alla tua area geografica, ti consigliamo di selezionare: .
Puoi anche selezionare un sito web dal seguente elenco:
Come ottenere le migliori prestazioni del sito
Per ottenere le migliori prestazioni del sito, seleziona il sito cinese (in cinese o in inglese). I siti MathWorks per gli altri paesi non sono ottimizzati per essere visitati dalla tua area geografica.
Americhe
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)