Convex Hull Computation with delaunayTriangulation
Compute the convex hull of a set of points in 2-D by using the convexHull method of the delaunayTriangulation class.
Create a Delaunay triangulation of a set of points in 2-D.
X = [-1.5 3.2;1.8 3.3;-3.7 1.5;-1.5 1.3;0.8 1.2; ... 3.3 1.5;-4.0 -1.0;-2.3 -0.7;0 -0.5;2.0 -1.5; ... 3.7 -0.8;-3.5 -2.9;-0.9 -3.9;2.0 -3.5;3.5 -2.25]; dt = delaunayTriangulation(X);
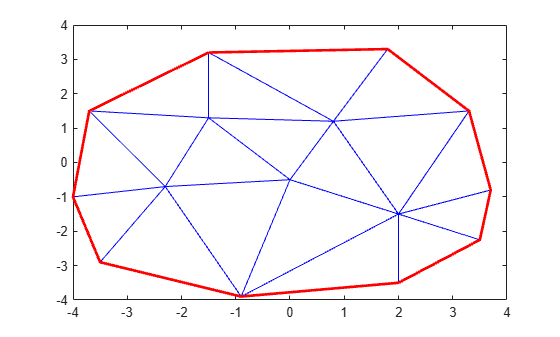
Plot the triangulation. Highlight the edges shared only by a single triangle to reveal the convex hull.
triplot(dt) fe = freeBoundary(dt)'; hold on plot(X(fe,1),X(fe,2),"-r",LineWidth=2) hold off
In 3-D, the facets of the triangulation that are shared only by one tetrahedron represent the boundary of the convex hull.
The dedicated convhull function is generally more efficient than a computation based on the convexHull method. However, the triangulation based approach is appropriate if:
You already have a
delaunayTriangulationof the point set and the convex hull is also required.You need to add or remove points from the set incrementally and need to recompute the convex hull frequently after you have edited the points.