predict
Description
predict(
predicts the state and state error covariance. slamObj,controlInput)predict uses the
StateTransitionFcn
property of the ekfSLAM object,
slamObj, and the controller input controlInput
to predict the state.
predict(
passes all additional arguments specified in slamObj,controlInput,varargin)varargin to the underlying
StateTransitionFcn
property of slamObj.
The first input to StateTransitionFcn is the pose from the previous
time step, followed by all user-defined arguments in varargin.
Examples
Load a race track data set that contains the initial vehicle state, initial vehicle state covariance, process noise covariance, control input, time step size, measurement, measurement covariance, and validation gate values.
load("racetrackDataset.mat","initialState","initialStateCovariance", ... "processNoise","controllerInputs","timeStep", ... "measurements","measCovar","validationGate");
Create an ekfSLAM object with initial state, initial state covariance, and process noise.
ekfSlamObj = ekfSLAM("State",initialState, ... "StateCovariance",initialStateCovariance, ... "ProcessNoise",processNoise);
Initialize a variable to store the pose.
storedPose = nan(size(controllerInputs,1)+1,3); storedPose(1,:) = ekfSlamObj.State(1:3);
Predict the state using the control input and time step size for the state transition function. Then, correct the state using the data of the observed landmarks, measurement covariance, and validation gate for the data association function.
for count = 1:size(controllerInputs,1) % Predict the state predict(ekfSlamObj,controllerInputs(count,:),timeStep); % Get the landmarks in the environment observedLandmarks = measurements{count}; % Correct the state if ~isempty(observedLandmarks) correct(ekfSlamObj,observedLandmarks, ... measCovar,validationGate); end % Log the estimated pose storedPose(count+1,:) = ekfSlamObj.State(1:3); end
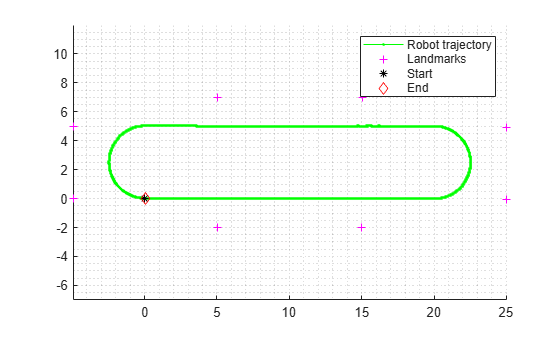
Visualize the created map.
fig = figure; figAx = axes(fig); axis equal grid minor hold on plot(figAx,storedPose(:,1),storedPose(:,2),"g.-") landmarks = reshape(ekfSlamObj.State(4:end),2,[])'; plot(figAx,landmarks(:,1),landmarks(:,2),"m+") plot(figAx,storedPose(1,1),storedPose(1,2),"k*") plot(figAx,storedPose(end,1),storedPose(end,2),"rd") legend("Robot trajectory","Landmarks","Start","End")
Input Arguments
Extended Capabilities
Version History
Introduced in R2021b