mesh
Description
Examples
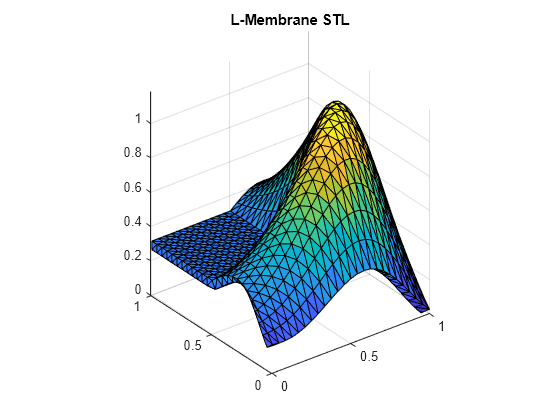
Read and plot the triangulation data from the L-membrane STL. You can use this to compare with the signed distance map.
triL = stlread("L-Membrane.stl"); trisurf(triL) title("L-Membrane STL") [az,el] = view; axis equal
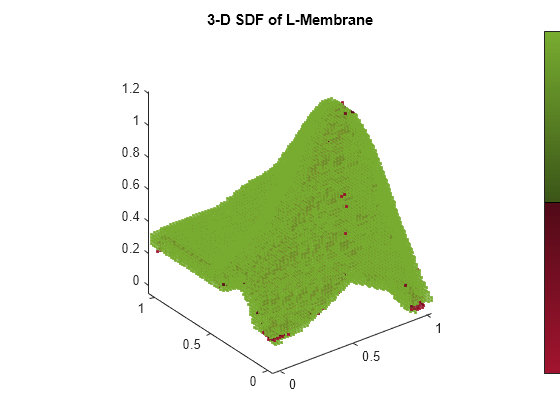
Create an empty 3-D signed distance field (SDF) and load the point cloud data for the L-membrane from a MAT file. The MAT file contains point cloud data and the sensor origin associated with each point cloud data.
sdm3D = signedDistanceMap3D(Resolution=50);
load LMembranePC.matInsert each point cloud into the signed distance field and show the updated 3-D SDF.
for i = 1:size(ptcloud,1) insertPointCloud(sdm3D,origin(i,:),ptcloud{i}); show(sdm3D,Colorbar="on"); view(az,el) axis equal drawnow pause(.25) end title(["3-D SDF of L-Membrane"])
Get all active voxels in the 3-D SDF.
vox = activeVoxels(sdm3D)
vox = struct with fields:
ID: 1
Centers: [49889×3 double]
Distances: [49889×1 double]
Sizes: [49889×1 double]
For demonstrative purposes, use a random xyz-offset from the voxel centers of the first three voxels as query points. Then get the distance and gradient using those query points.
querypts = vox.Centers(1:3,:) + 0.1*rand(3,3); d = distance(sdm3D,querypts)
d = 3×1
0.0379
-0.0447
0.0600
g = gradient(sdm3D,querypts)
g = 3×3
0.1924 1.5773 -1.4002
0.1689 1.6524 -0.8267
-0.0715 -0.2335 0.3677
Generate a mesh from the 3-D signed distance field.
[vertices,faces] = mesh(sdm3D)
vertices = 18860×3
-0.0100 0.0068 0.1500
-0.0300 0.0059 0.1500
-0.0100 0.0100 0.1610
-0.0300 0.0100 0.1565
0.0100 0.0047 0.1500
-0.0100 -0.0100 0.1409
0.0100 -0.0100 0.1421
0.0100 0.0025 0.1700
-0.0010 0.0100 0.1700
0.0100 0.0094 0.1900
0.0089 0.0100 0.1900
0.0100 0.0100 0.1909
-0.0100 0.0187 0.1700
-0.0300 0.0259 0.1700
-0.0100 0.0552 0.1500
⋮
faces = 37094×3
2 1 3
4 2 3
7 1 6
5 1 7
9 3 1
9 1 8
8 1 5
8 10 11
9 8 11
10 12 11
3 14 4
13 14 3
15 16 17
16 18 17
9 13 3
⋮
Visualize the mesh data.
meshTri = triangulation(faces,vertices); trisurf(meshTri) axis equal title("Mesh from 3-D SDF")
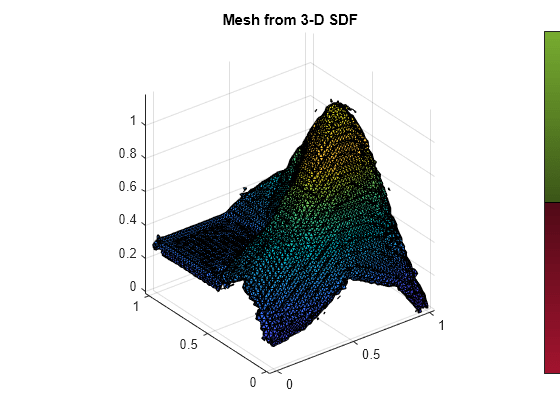
If needed, you can use this mesh data to create a collision mesh using V-HACD. See collisionVHACD (Robotics System Toolbox) for more information.
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2024b