grazingang
Grazing angle of surface target
Syntax
Description
grazAng = grazingang(___,TargetHeight=TGTHT)TGTHT above the surface as either a
scalar or a vector. If any combination of ht, R,
and TGTHT are vectors, then the dimensions must be equal.
R must be greater than or equal to the absolute value of the
difference of HT and TGTHT.
Examples
Input Arguments
Output Arguments
More About
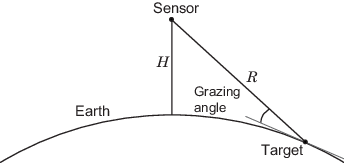
The grazing angle is the angle between a line from the sensor to a surface target, and a tangent to the earth at the site of that target.
For the curved earth model with an effective earth radius of Re, the grazing angle is:
For the flat earth model, the grazing angle is:
References
[1] Long, Maurice W. Radar Reflectivity of Land and Sea, 3rd Ed. Boston: Artech House, 2001.
[2] Ward, J. "Space-Time Adaptive Processing for Airborne Radar Data Systems." Technical Report 1015, MIT Lincoln Laboratory, December 1994.
Extended Capabilities
Version History
Introduced in R2021a