Robust Performance Measure for Mu Synthesis
The robust H∞ performance quantifies how modeled uncertainty affects the performance of a feedback loop. Performance here is measured with the H∞ norm (peak gain) of a transfer function of interest, such as that from disturbance to error signals. (See H-Infinity Performance.)
For a system T(s), the robust H∞ performance μ is the smallest value γ such that the peak gain of T remains below γ for uncertainty up to 1/γ, in normalized units. For example:
μ = 0.5 means that ||T(s)||∞ remains below 0.5 for uncertainty up to twice the uncertainty specified in T. The worst-case gain for the specified uncertainty is typically smaller.
μ = 2 means that ||T(s)||∞ remains below 2 for uncertainty up to half the uncertainty specified in T. For this value, the worst-case gain for the full specified uncertainty can be much larger. It can even be infinite, meaning that the system does not remain stable over the full range of the specified uncertainty.
The quantity μ is the peak value over frequency of the structured singular value μ(ω) for the uncertainty specified in T. This quantity is a generalization of the singular value for uncertain systems. It depends on the structure of the uncertainty in the system. In practice, μ is difficult to compute exactly, so the software instead computes lower and upper bounds, and . The upper bound has several applications in control system design and analysis. You can:
Use
musynto design a controller for an uncertain plant that minimizes of the closed-loop system. In addition to the resulting controller,musynreturns the corresponding value of in theCLperfoutput argument.Use
musynperfevaluate the robust performance of an uncertain system. This function returns lower and upper bounds on μ, the uncertainty values that yield the peak μ, and other information about the closed-loop robust performance.
Uncertain Model
To understand the computation of robust H∞ performance, consider an uncertain system T(s), modeled as a fixed portion T0 and an uncertain portion Δunc/γ, such that .
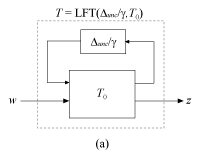
Δunc collects the uncertain elements {Δ1,…,ΔN}.
Each Δj is an arbitrary real, complex, or dynamic uncertainty that is normalized such that ||Δj||∞ ≤ 1. The factor γ adjusts the level of uncertainty.
Robust Performance as a Robust Stability Margin
Suppose that for the system modeled as in diagram (a),
||T||∞ ≤ γ for all ||Δunc||∞ ≤ 1.
By the small-gain theorem (see [1]), this robust performance condition is equivalent to stating that the system of diagram (b), LFT(Δperf/γ,T), is stable for all for all ||Δperf||∞ ≤ 1.

Δperf is called the performance block. Expand T as in diagram (a), and group Δperf with the uncertain blocks Δunc to define a new block Δ,
The result is the system in the following diagram.

Thus, the robust performance condition on the system of diagram (a) is equivalent to a stability condition on diagram (c), or
The robust performance μ is the smallest γ for which this stability condition holds. Equivalently, 1/μ is the largest uncertainty level 1/γ for which the system of diagram (c) is robustly stable. In other words, 1/μ is the robust stability margin of the feedback loop of diagram (c) for the augmented uncertainty Δ. (For more information on robust stability margins, see Robustness and Worst-Case Analysis.)
Upper Bound of μ
To obtain an estimate on the upper bound of μ, the software introduces scalings. If the system in diagram (c) is stable for all ||Δ||∞ ≤ 1, then the system of the following diagram is also stable, for any invertible D.
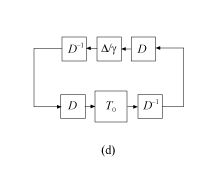
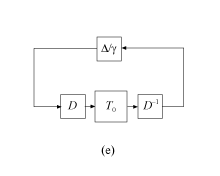
If D commutes with Δ, then the system of diagram (d) is the same as the system in the following diagram.
The matrices D that structurally commute with Δ are called D scalings. They can be frequency dependent, which is denoted by D(ω).
Define as:
For the optimal D*(ω), and any γ ≥ ,
Therefore, by the small-gain theorem, the system of diagram (e) is stable for all ||Δ||∞ ≤ 1. It follows that 1/γ ≤ 1/μ, or γ ≤ μ, because 1/μ is the robust stability margin.
Consequently, μ ≤ , so that is an upper bound for the robust performance μ. This
upper bound is the quantity computed by musynperf and optimized
by musyn.
D and G Scalings
When all the uncertain elements Δj are complex or LTI dynamics, the software approximates by picking a frequency grid {ω1,…,ωN}. At each frequency point, the software solves the optimal scaling problem
It then sets to the largest result over all frequencies in the grid,
When some Δj are real, it is possible to obtain a less conservative upper bound by using additional scalings called G scalings. In this case, is the smallest over frequency such that
for some Dr(ωi), Dc(ωi), and Gcr(ωi). These frequency-dependent matrices are the D and G scalings.
Mu Synthesis
The musyn command synthesizes robust controllers using an iterative
process that optimizes the robust performance . To learn how to use musyn, see Robust Controller Design Using Mu Synthesis. For details about the
musyn algorithm, see D-K Iteration Process.
References
[1] Skogestad, S. and I. Postlethwaite, Multivariable Feedback Control: Analysis and Design, 2d ed. West Sussex, England: John Wiley & Sons, 2005, pp. 156, 306.