Blank Message
Create blank message using specified message type
Libraries:
ROS Toolbox /
ROS
Description
The Blank Message block creates a Simulink® nonvirtual bus corresponding to the selected ROS message type. The block creates ROS message buses that work with Publish, Subscribe, or Call Service blocks. On each sample hit, the block outputs a blank or “zero” signal for the designated message type. All elements of the bus are initialized to 0. The lengths of the variable-length arrays are also initialized to 0.
Examples
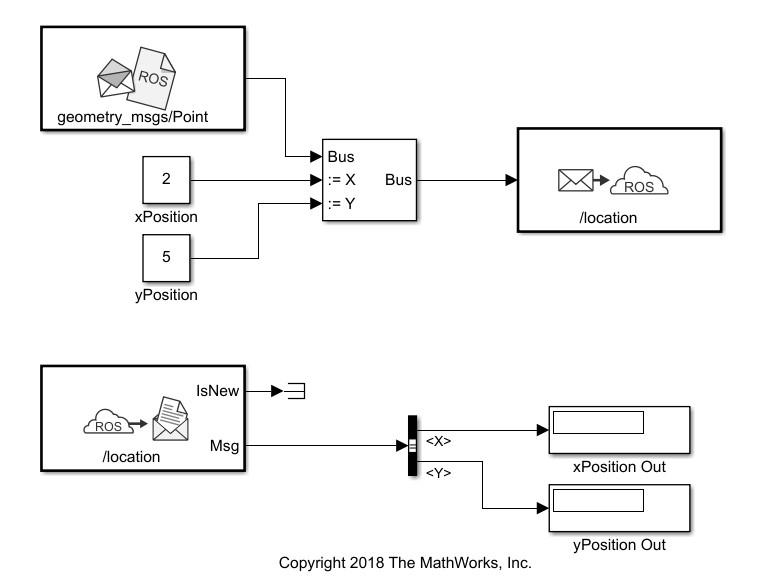
Publish and Subscribe to ROS Messages in Simulink
Publish and subscribe to a ROS topic using Simulink.
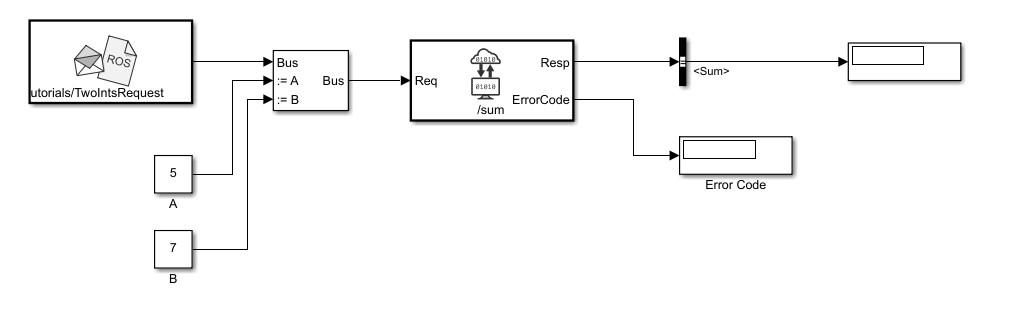
Call ROS Service in Simulink
Use the Call Service block to call a service on the ROS service server.
Limitations
Before R2016b, models using ROS message types with certain reserved property names could not generate code. In 2016b, this limitation has been removed. The property names are now appended with an underscore (e.g. Vector3Stamped_). If you use models created with a pre-R2016b release, update the ROS message types using the new names with an underscore. Redefine custom maximum sizes for variable length arrays.
The affected message types are:
'geometry_msgs/Vector3Stamped''jsk_pcl_ros/TransformScreenpointResponse''pddl_msgs/PDDLAction''rocon_interaction_msgs/Interaction''capabilities/GetRemappingsResponse''dynamic_reconfigure/Group'
Ports
Output
Parameters
Extended Capabilities
Version History
Introduced in R2019b