ROS Write Point Cloud, ROS 2 Write Point Cloud
Libraries:
ROS Toolbox /
ROS
ROS Toolbox /
ROS 2
Description
The Write Point Cloud block writes point cloud data to a ROS or ROS 2 point cloud message. You can specify the appropriate color encoding for the point cloud image and write the corresponding color and alpha values to the output message. You can also write intensity values to the output message. Use the ROS Publish or ROS 2 Publish block to publish the output image message to an active topic on the network.
Examples
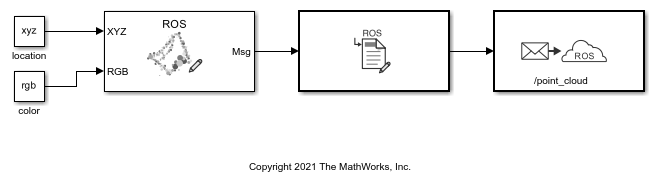
Write a ROS Point Cloud Message in Simulink
Write a point cloud message and publish it to a ROS network in Simulink®.

Publish Ground Truth and Sensor Data from RoadRunner Scenario to ROS 2 Network
Publish ground-truth and sensor data from a RoadRunner scenario to ROS 2 network and visualize it using ROS Data Analyzer app.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2022a
See Also
rosReadXYZ | rosReadRGB | rosPlot | rosReadField | rosReadAllFieldNames