Time Stamp ROS Message Using Current Time in Simulink
This example shows how to time stamp a ROS message with the current system time of your computer. Use the Current Time block and assign the output to the std_msgs/Header message in the Stamp field. Publish the message on a desired topic.
Connect to a ROS network.
rosinit
Launching ROS Core... ......Done in 7.3072 seconds. Initializing ROS master on http://172.18.250.141:50911. Initializing global node /matlab_global_node_88885 with NodeURI http://HYD-SHIVARAD:50593/
Open the Simulink® model provided with this example. The model uses a Bus Assignment block to add the Current Time output to the Stamp field of the ROS message.
open_system('current_time_stamp_message.slx')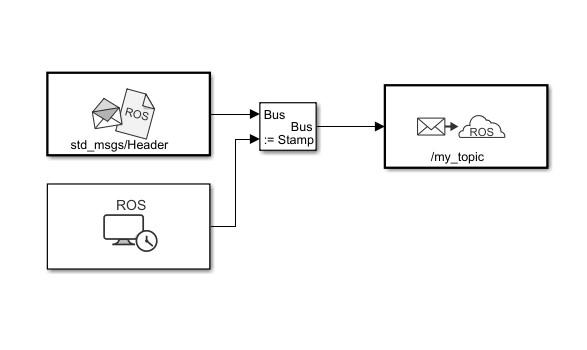
Run the model. The Publish block should publish the Header message with the current system time.
sim('current_time_stamp_message.slx')Shut down the ROS network.
rosshutdown
Shutting down global node /matlab_global_node_88885 with NodeURI http://HYD-SHIVARAD:50593/ Shutting down ROS master on http://172.18.250.141:50911.