pburg
Autoregressive power spectral density estimate — Burg’s method
Syntax
Description
pxx = pburg(x,order)pxx,
of a discrete-time signal, x, found using Burg’s
method. When x is a vector, it is treated as
a single channel. When x is a matrix, the PSD
is computed independently for each column and stored in the corresponding
column of pxx. pxx is the
distribution of power per unit frequency. The frequency is expressed
in units of rad/sample. order is the order of
the autoregressive (AR) model used to produce the PSD estimate.
pxx = pburg(x,order,nfft)nfft points
in the discrete Fourier transform (DFT). For real x, pxx has
length (nfft/2+1) if nfft is
even, and (nfft+1)/2 if nfft is
odd. For complex–valued x, pxx always
has length nfft. If you omit nfft,
or specify it as empty, then pburg uses a default
DFT length of 256.
[
returns a frequency vector, pxx,f] = pburg(___,Fs)f, in cycles per unit time. The sample rate,
Fs, is the number of samples per unit time. If the unit of time is
seconds, then f is in cycles/second (Hz). For real-valued signals,
f spans the interval [0,Fs/2] when
nfft is even and [0,Fs/2) when
nfft is odd. For complex-valued signals, f spans the
interval [0,Fs). Fs must be the fourth input to
pburg. To input a sample rate and still use the default values of
the preceding optional arguments, specify these arguments as empty,
[].
[
returns the two-sided AR PSD estimates at the frequencies specified in the vector,
pxx,f] = pburg(x,order,f,Fs)f. The vector f must contain at least two elements,
because otherwise the function interprets it as nfft. The frequencies in
f are in cycles per unit time. The sample rate, Fs,
is the number of samples per unit time. If the unit of time is seconds, then
f is in cycles/second (Hz).
pburg(___) with no output arguments
plots the AR PSD estimate in dB per unit frequency in the current
figure window.
Examples
Create a realization of an AR(4) wide-sense stationary random process. Estimate the PSD using Burg's method. Compare the PSD estimate based on a single realization to the true PSD of the random process.
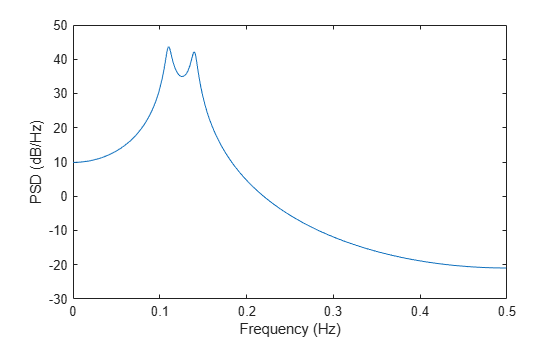
Create an AR(4) system function. Obtain the frequency response and plot the PSD of the system.
A = [1 -2.7607 3.8106 -2.6535 0.9238]; [H,F] = freqz(1,A,[],1); plot(F,mag2db(abs(H))) xlabel("Frequency (Hz)") ylabel("PSD (dB/Hz)")
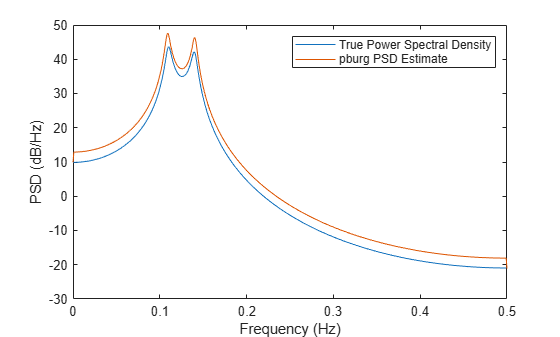
Create a realization of the AR(4) random process. Set the random number generator to the default settings for reproducible results. The realization is 1000 samples in length. Assume a sample rate of 1 Hz. Use pburg to estimate the PSD for a 4th-order process. Compare the PSD estimate with the true PSD.
rng("default") x = randn(1000,1); y = filter(1,A,x); [Pxx,F] = pburg(y,4,1024,1); hold on plot(F,pow2db(Pxx)) legend(["True Power Spectral Density" "pburg PSD Estimate"])
Create a realization of an AR(4) process. Use arburg to determine the reflection coefficients. Use the reflection coefficients to determine an appropriate AR model order for the process. Obtain an estimate of the process PSD.
Create a realization of an AR(4) process 1000 samples in length. Reset the random number generator for reproducible results.
rng("default")
A = [1 -2.7607 3.8106 -2.6535 0.9238];
x = filter(1,A,randn(1000,1));Use arburg with the order set to 12 to return the reflection coefficients. Plot the reflection coefficients to determine an appropriate model order.
[a,e,k] = arburg(x,12); stem(k,"filled") title("Reflection Coefficients") xlabel("Model Order")
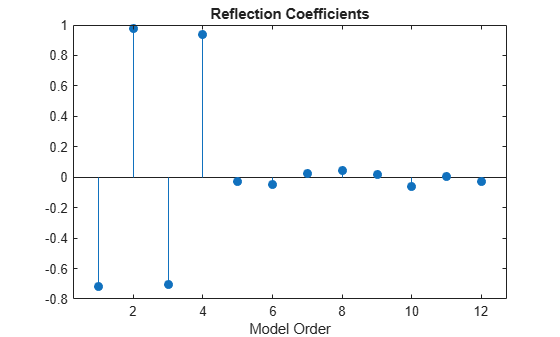
The reflection coefficients decay to zero after order 4. This response indicates that an AR(4) model is most appropriate.
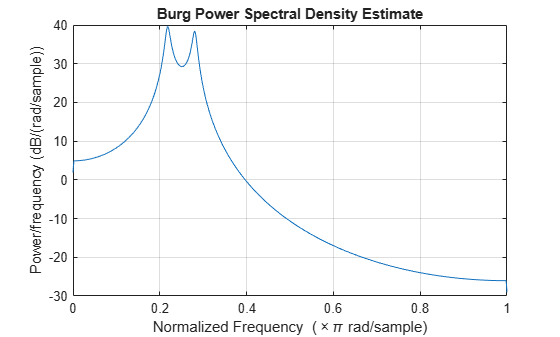
Obtain a PSD estimate of the random process using Burg's method. Use 1000 points in the DFT. Plot the PSD estimate.
pburg(x,4,length(x))
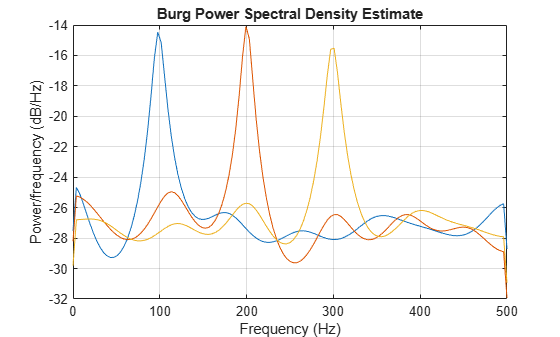
Create a multichannel signal consisting of three sinusoids in additive white Gaussian noise. Reset the random number generator for reproducible results. The sinusoids frequencies are 100 Hz, 200 Hz, and 300 Hz. The sample rate is 1 kHz, and the signal has a duration of 1 second.
rng("default")
Fs = 1000;
t = 0:1/Fs:1-1/Fs;
f = [100;200;300];
x = cos(2*pi*f*t)' + randn(length(t),3);Estimate the PSD of the signal using Burg's method with a 12th-order autoregressive model. Use the default DFT length. Plot the estimate.
mOrder = 12; pburg(x,mOrder,[],Fs)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced before R2006a