tf2sos
Convert digital filter transfer function data to second-order sections form
Syntax
Description
Examples
Design a Butterworth 4th-order lowpass filter using the function butter. Specify the cutoff frequency as half the Nyquist frequency. Implement the filter as second-order sections. Verify that the two representations are identical by comparing their numerators and denominators.
[nm,dn] = butter(4,0.5); [ss,gn] = tf2sos(nm,dn); numers = [conv(ss(1,1:3),ss(2,1:3))*gn;nm]
numers = 2×5
0.0940 0.3759 0.5639 0.3759 0.0940
0.0940 0.3759 0.5639 0.3759 0.0940
denoms = [conv(ss(1,4:6),ss(2,4:6));dn]
denoms = 2×5
1.0000 -0.0000 0.4860 -0.0000 0.0177
1.0000 -0.0000 0.4860 -0.0000 0.0177
A one-dimensional discrete-time oscillating system consists of a unit mass, , attached to a wall by a spring of unit elastic constant. A sensor samples the acceleration, , of the mass at Hz.
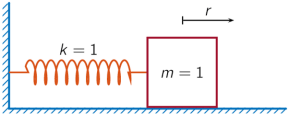
Generate 50 time samples. Define the sampling interval .
Fs = 5; dt = 1/Fs; N = 50; t = dt*(0:N-1); u = [1 zeros(1,N-1)];
The transfer function of the system has an analytic expression:
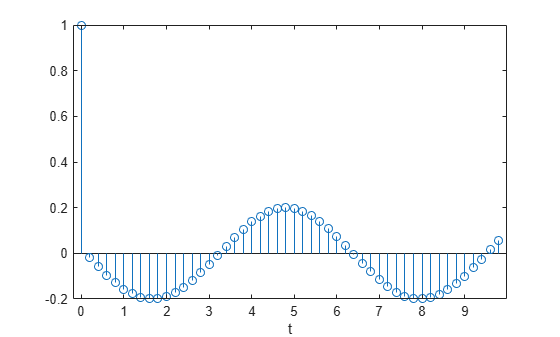
The system is excited with a unit impulse in the positive direction. Compute the time evolution of the system using the transfer function. Plot the response.
bf = [1 -(1+cos(dt)) cos(dt)]; af = [1 -2*cos(dt) 1]; yf = filter(bf,af,u); stem(t,yf,"o") xlabel("t")
Compute the time-dependent acceleration using the second-order sections representation of the transfer function to filter the input. Plot the result. The result is the same in both cases.
sos = tf2sos(bf,af);
yt = sosfilt(sos,u);
stem(t,yt,"filled")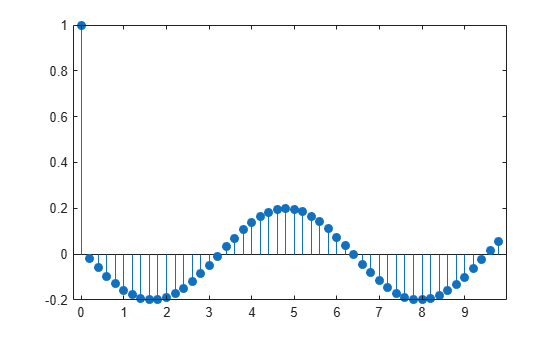
Input Arguments
Output Arguments
Algorithms
tf2sos uses a four-step algorithm to determine the second-order
section representation for an input transfer function system:
It finds the poles and zeros of the system given by
banda.It uses the function
zp2sos, which first groups the zeros and poles into complex conjugate pairs using thecplxpairfunction.zp2sosthen forms the second-order sections by matching the pole and zero pairs according to the following rules:Match the poles closest to the unit circle with the zeros closest to those poles.
Match the poles next closest to the unit circle with the zeros closest to those poles.
Continue until all of the poles and zeros are matched.
tf2sosgroups real poles into sections with the real poles closest to them in absolute value. The same rule holds for real zeros.It orders the sections according to the proximity of the pole pairs to the unit circle.
tf2sosnormally orders the sections with poles closest to the unit circle last in the cascade. You can telltf2sosto order the sections in the reverse order by specifyingorderas'down'.tf2sosscales the sections by the norm specified inscale. For arbitrary H(ω), the scaling is defined bywhere p can be either ∞ or 2. See the references for details on the scaling. The algorithm follows this scaling in an attempt to minimize overflow or peak round-off noise in fixed-point filter implementations.
References
[1] Jackson, L. B. Digital Filters and Signal Processing. 3rd ed. Boston: Kluwer Academic Publishers, 1996.
[2] Mitra, S. K. Digital Signal Processing: A Computer-Based Approach. New York: McGraw-Hill, 1998.
[3] Vaidyanathan, P. P. “Robust Digital Filter Structures.” Handbook for Digital Signal Processing (S. K. Mitra and J. F. Kaiser, eds.). New York: John Wiley & Sons, 1993.
Extended Capabilities
Version History
Introduced before R2006a