Massa-molla-smorzatore con controller
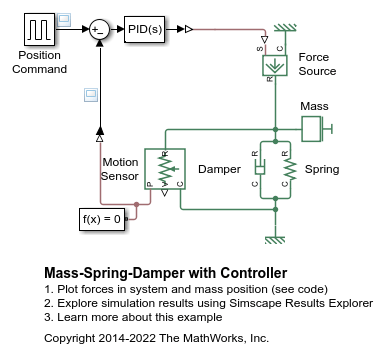
Questo esempio mostra una massa-molla-smorzatore controllata. Un controller regola la forza sulla massa in modo che la sua posizione segua un segnale di comando. La velocità iniziale della massa è di 10 metri al secondo. Il controller regola la forza applicata dalla sorgente della forza per seguire le variazioni di passo del segnale di input.
Modello
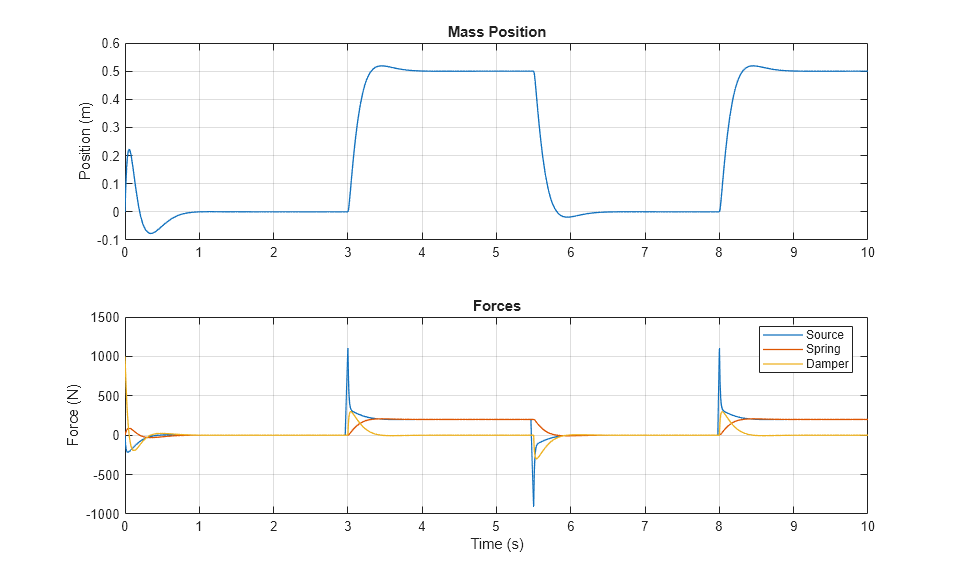
Risultati di simulazione da Simscape Logging
I grafici seguenti mostrano la posizione della massa e le forze che agiscono su di essa.