Sistemi meccanici
Scoprire gli esempi che illustrano la modellazione, il controllo e la simulazione di sistemi meccanici.
Informazioni complementari
Esempi in primo piano
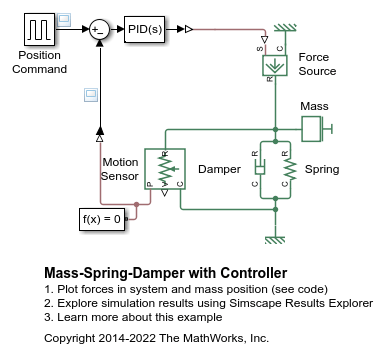
Massa-molla-smorzatore con controller
Questo esempio mostra una massa-molla-smorzatore controllata. Un controller regola la forza sulla massa in modo che la sua posizione segua un segnale di comando. La velocità iniziale della massa è di 10 metri al secondo. Il controller regola la forza applicata dalla sorgente della forza per seguire le variazioni di passo del segnale di input.
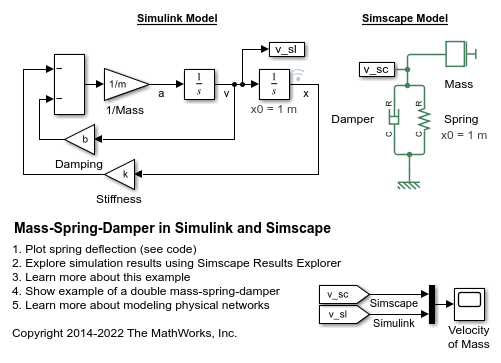
Massa-molla-smorzatore in Simulink e Simscape
Questo esempio confronta un modello massa-molla-smorzatore che utilizza blocchi Simscape™ e connessioni fisiche con un modello che utilizza blocchi Simulink® e segnali.

Doppio sistema massa-molla-smorzatore in Simulink e Simscape
Questo esempio mostra due modelli di un doppio sistema massa-molla-smorzatore, di cui uno utilizza i blocchi di input/output di Simulink® e l'altro le reti fisiche di Simscape™.

Sistemi meccanici semplici
Questo esempio mostra un modello di sistema che collega il movimento rotazionale e traslazionale. Una leva sommatoria aziona un carico costituito da una massa, un attrito viscoso e una molla collegata al suo giunto C. Il giunto B è sospeso su due molle rotazionali collegate al punto di riferimento tramite una ruota, un asse e un riduttore. Il giunto A è collegato a una sorgente coppia attraverso un riduttore e un meccanismo ruota e asse.
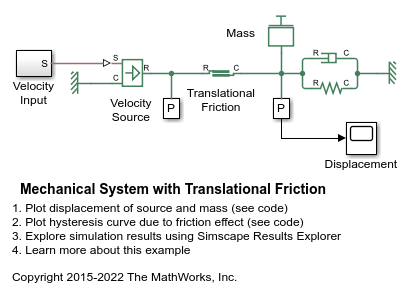
Sistema meccanico con attrito traslazionale
Questo esempio mostra una massa collegata a una molla e a uno smorzatore viscoso. La massa è azionata da una sorgente di velocità ideale attraverso un elemento di attrito. Il profilo di movimento della sorgente è selezionato in modo tale che, tracciando lo spostamento della massa rispetto allo spostamento fornito dalla sorgente, si ottenga una curva tipica di isteresi.
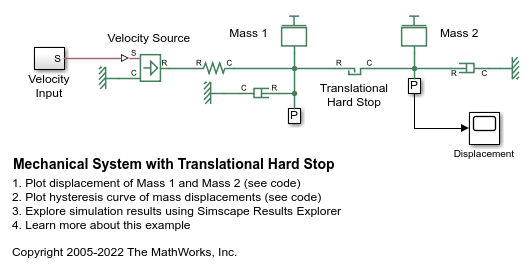
Sistema meccanico con arresto rigido traslazionale
Questo esempio mostra due masse collegate da un arresto rigido. La massa 1 è azionata da una sorgente di velocità ideale. Quando l'input di velocità cambia direzione, la massa 2 rimane ferma finché la massa 1 non raggiunge l'altra estremità del gioco modellato dall'arresto rigido traslazionale. Tracciando lo spostamento della massa 2 rispetto allo spostamento della massa 1 si ottiene una curva tipica di isteresi.
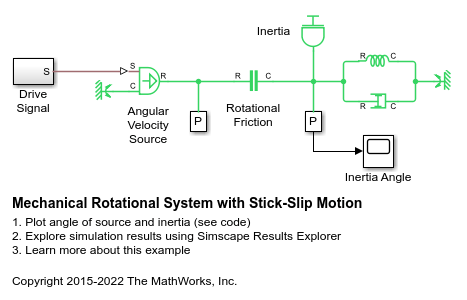
Sistema meccanico rotazionale con movimento stick-slip
Questo modello mostra un sistema meccanico rotazionale con attrito stick-slip. Un'inerzia è collegata a un punto fisso tramite una molla e uno smorzatore. L'inerzia è controllata da una sorgente di velocità tramite un elemento di attrito stick-slip. L'elemento di attrito presenta una differenza tra l'attrito di stacco e quello di Coulomb, determinando un movimento stick-slip dell'inerzia.
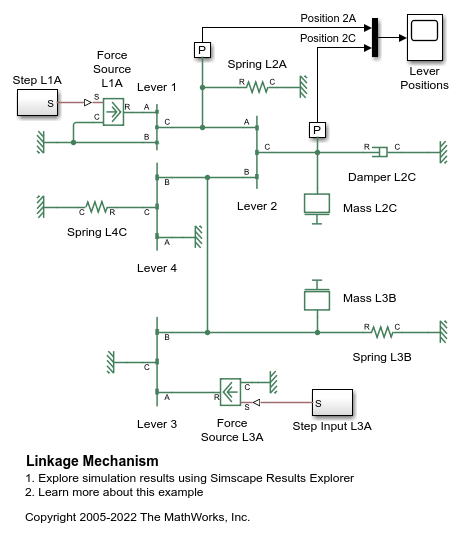
Meccanismo di collegamento
Questo esempio mostra l'utilizzo del blocco Simscape™ Lever in un meccanismo di collegamento. La leva 1 e la leva 4 sono leve di primo tipo con il fulcro all'estremità. La leva 3 è una leva di secondo tipo con il fulcro al centro. La leva 2 è una leva sommatoria azionata dalla prima e dalla terza leva.

Pendulum in Cartesian and Polar Coordinates
Two different implementations of a planar pendulum.
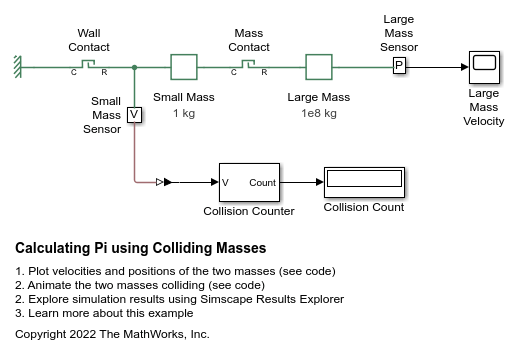
Calcolo del Pi greco utilizzando masse in collisione
Questo esempio utilizza un noto problema di fisica per dimostrare le prestazioni del risolutore catturando decine di migliaia di eventi istantanei che si verificano in meno di un secondo. Su un percorso unidimensionale, una massa grande si avvicina a una massa piccola, confinata da un muro sul lato opposto. Nel momento in cui la massa grande colpisce la massa piccola, quest'ultima rimbalza contro il muro e inverte la direzione verso la massa grande. Ciascuna collisione è perfettamente elastica. Man mano che la massa grande si avvicina al muro, le collisioni con la massa piccola avvengono sempre più rapidamente, fino a quando la massa grande inverte la direzione e viaggia infine abbastanza velocemente nella direzione opposta da non poter mai essere raggiunta dalla massa piccola.