Perform Operations on Coverage Data
This example shows how to use the overloaded operators +, *, and - to combine coverage results into a union, intersection, or set difference of results.
Open Model
Open the slvnvdemo_cv_mutual_exclusion model. The model contains a Constant block connected to the enable port of two subsystems. One of the subsystems has a NOT block placed before the enable port, which means only one of the subsystems can be enabled at a time.
modelName = "slvnvdemo_cv_mutual_exclusion";
open_system(modelName)

Create a Simulink.SimulationInput object and then use setModelParameter to set some coverage parameters.
simIn = Simulink.SimulationInput(modelName);
Enable coverage analyze for the model by setting the CovEnable parameter to on.
simIn = setModelParameter(simIn,"CovEnable","on");
Set the structural coverage level to Decision.
simIn = setModelParameter(simIn,"CovMetricStructuralLevel","Decision");
Display the coverage data in MATLAB® instead of the file location by setting CovSaveOutputData to off. This also prevents Simulink® Coverage® from automatically saving the coverage data to a file after the simulation.
simIn = setModelParameter(simIn,"CovSaveOutputData","off");
Simulate the model by using simIn as the input to sim. The SimulationOutput object contains the coverage data as a property whose name is equal to the value of the CovSaveName configuration parameter. The default value is covdata.
simOut1 = sim(simIn); data1 = simOut1.covdata
data1 = ... cvdata
version: (R2026a)
id: 1526
type: TEST_DATA
test: cvtest object
rootID: 1528
checksum: [1x1 struct]
modelinfo: [1x1 struct]
startTime: 19-Apr-2026 12:17:52
stopTime: 19-Apr-2026 12:17:52
intervalStartTime:
intervalStopTime:
simulationStartTime: 0
simulationStopTime: 10
filter:
simMode: Normal
Change which subsystem is enabled by using the setBlockParameter method to change the value of the Constant block from 0 to 1, and then simulate the model again.
simIn = setBlockParameter(simIn,modelName+"/Constant","value","1"); simOut2 = sim(simIn); data2 = simOut2.covdata
data2 = ... cvdata
version: (R2026a)
id: 1579
type: TEST_DATA
test: cvtest object
rootID: 1528
checksum: [1x1 struct]
modelinfo: [1x1 struct]
startTime: 19-Apr-2026 12:17:53
stopTime: 19-Apr-2026 12:17:53
intervalStartTime:
intervalStopTime:
simulationStartTime: 0
simulationStopTime: 10
filter:
simMode: Normal
Use the decisioninfo function to extract the decision coverage from each simulation and determine the percentage of decision outcomes satisfied.
cov1 = decisioninfo(data1,modelName); percent1 = 100*(cov1(1)/cov1(2)) cov2 = decisioninfo(data2,modelName); percent2 = 100*(cov2(1)/cov2(2))
percent1 =
50
percent2 =
50
Both simulations have 50% coverage. To check if the two simulations cover the same 50% of decision outcomes, look at the union and intersection of the two objects.
Find the Union of Coverage
Use the + operator to derive a third cvdata object that represents the union of data1 and data2 cvdata objects. The union of two or more cvdata objects is also referred to as cumulative coverage or aggregated coverage.
When you create cvdata objects by combining other simulation results, the type property of the new object is DERIVED_DATA.
dataUnion = data1 + data2
dataUnion = ... cvdata
version: (R2026a)
id: 0
type: DERIVED_DATA
test: []
rootID: 1528
checksum: [1x1 struct]
modelinfo: [1x1 struct]
startTime: 19-Apr-2026 12:17:52
stopTime: 19-Apr-2026 12:17:53
intervalStartTime:
intervalStopTime:
filter:
simMode: Normal
Extract the decision coverage results and determine the percentage of decision outcomes satisfied by calling the decisioninfo function on dataUnion.
covU = decisioninfo(dataUnion,modelName); percentU = 100*(covU(1)/covU(2))
percentU = 100
The union of the two simulations reports that 100% decision outcomes are satisfied. This result indicates that there is no overlap in the coverage between the two simulations and that all decision outcomes are satisfied.
Find the Intersection of Coverage
Confirm that the coverage does not overlap between the two simulations by intersecting data1 and data2 with the * operator. The intersection returns only the coverage outcomes that are satisfied in both cvdata objects.
dataIntersection = data1 * data2 covI = decisioninfo(dataIntersection,modelName); percentI = 100*(covI(1)/covI(2))
dataIntersection = ... cvdata
version: (R2026a)
id: 0
type: DERIVED_DATA
test: []
rootID: 1528
checksum: [1x1 struct]
modelinfo: [1x1 struct]
startTime: 19-Apr-2026 12:17:52
stopTime: 19-Apr-2026 12:17:53
intervalStartTime:
intervalStopTime:
filter:
simMode: Normal
percentI =
0
There is 0% decision coverage in the intersection because there is no overlap in coverage between the two simulations.
Compute the Coverage Difference
Use the - operator to create a cvdata object that represents the set difference between the left and right operands. The result of the operation contains the coverage outcomes that are satisfied in the left operand but not satisfied in the right operand. Use this operation to determine how much additional coverage is attributed to a particular simulation.
In this example, the difference between the union of the first and second simulation coverage and the first simulation coverage indicates how much additional coverage the second simulation provided. Because none of the decision coverage outcomes overlapped, the new decision coverage from the second simulation is 50%.
newCov2 = dataUnion - data1
covN = decisioninfo(newCov2,'slvnvdemo_cv_mutual_exclusion');
percentN = 100*(covN(1)/covN(2))
newCov2 = ... cvdata
version: (R2026a)
id: 0
type: DERIVED_DATA
test: []
rootID: 1528
checksum: [1x1 struct]
modelinfo: [1x1 struct]
startTime: 19-Apr-2026 12:17:52
stopTime: 19-Apr-2026 12:17:53
intervalStartTime:
intervalStopTime:
filter:
simMode: Normal
percentN =
50
Use Derived Coverage Data Objects
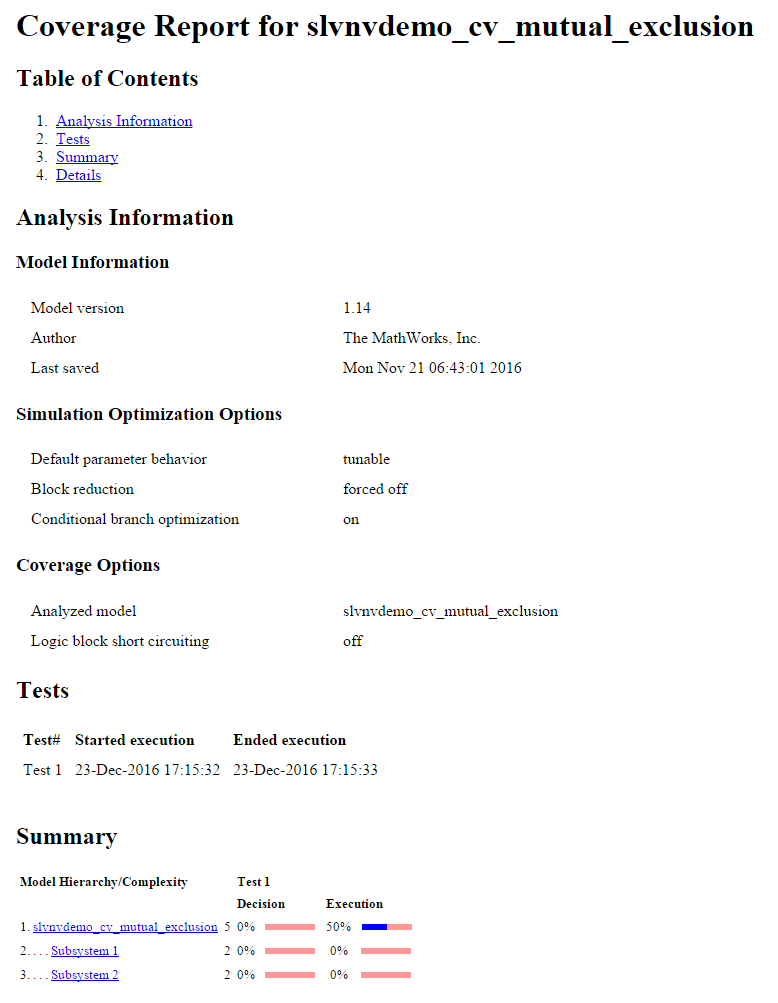
You can use derived cvdata objects in all reporting and analysis functions and as inputs to subsequent operations. For example, generate a coverage report from the derived dataIntersection object and create a new cvdata union.
cvhtml('intersect_cov', dataIntersection);
newUnion = dataUnion + dataIntersection
newUnion = ... cvdata
version: (R2026a)
id: 0
type: DERIVED_DATA
test: []
rootID: 1528
checksum: [1x1 struct]
modelinfo: [1x1 struct]
startTime: 19-Apr-2026 12:17:52
stopTime: 19-Apr-2026 12:17:53
intervalStartTime:
intervalStopTime:
filter:
simMode: Normal
See Also
cvdata | Simulink.SimulationInput | sim