Model a Rigid Body in MATLAB
This example shows how to create a rigid body by using the MATLAB classes of Simscape Multibody. In this example, you construct a link in a four-bar system, and define the geometry, mass distribution, and visual properties of the link. You then add frames and connectors to the link, which you can use to connect other frames and components.
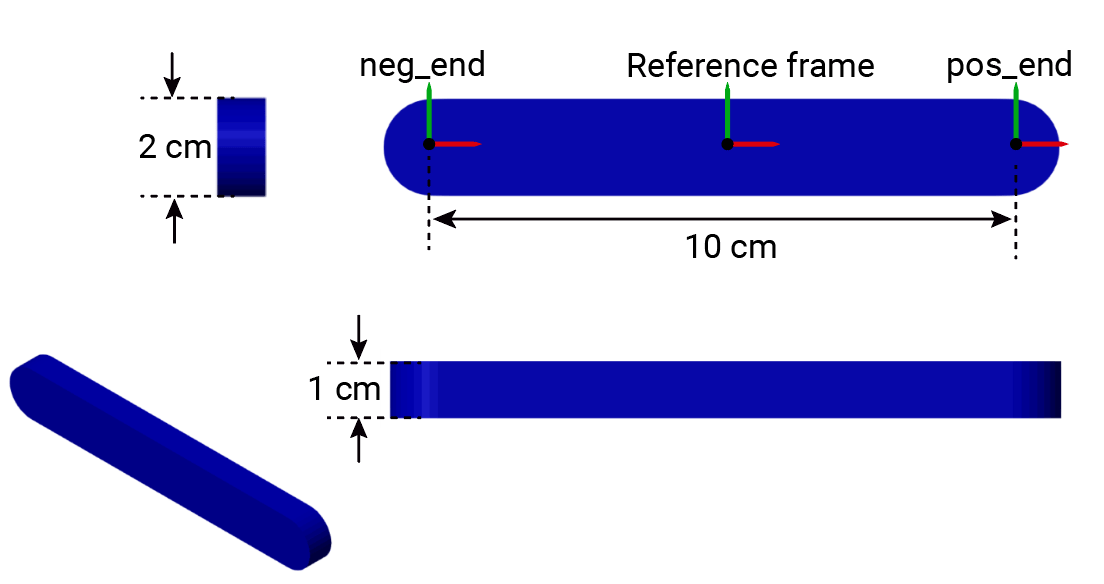
The link has a rectangular cross-section with rounded ends and two frame connectors at the link ends.
To avoid typing the namespace name for the classes, use the import function.
import simscape.Value simscape.op.* simscape.multibody.*;
First, create a simscape.multibody.RigidBody object to represent the link. A RigidBody object is a hierarchical container that can contain multiple rigidly connected frames and component objects. In this example, the RigidBody object includes one rigid solid with two end frame connectors.
To create a RigidBody object named link, use the simscape.multibody.RigidBody class.
link = RigidBody
link =
RigidBody:
No connectors.
Frames:
Frame Parent Source Connector?
___________ ______ ______ __________
"reference" -- -- No
No components.
RigidBody with properties:
FrameNames: "reference"
ComponentNames: [0×1 string]
DoVisualize: 1
FrameConnectors: [0×1 string]
The object includes one reference frame and no connectors.
Construct Link Body
To construct the body of the link, use the simscape.multibody.Solid class. You can specify the geometry, mass distribution, and visual properties of the body. As shown in the image, the link has a length of 10 cm, a width of 2 cm, and a height of 1 cm, with the length oriented along the x-axis of the local reference frame.
To define the dimensions, use simscape.Value objects.
length = Value(10,"cm"); width = Value(2,"cm"); height = Value(1,"cm");
The link has a rectangular cross-section with rounded ends. To define the geometry of the body, use the simscape.multibody.GeneralExtrusion class with a custom cross-section specified by the roundedRect function.
geometry = GeneralExtrusion(roundedRect(length,width),height); function cross_section = roundedRect(length,width) angles = (-90:10:+90)' * pi/180; semi = width/2 * [cos(angles) sin(angles)] + repmat([length/2 0], size(angles)); cross_section = [semi; -semi]; end
The example sets the width and height of the link to 2 cm and 1 cm, respectively, using hard-coded values.
The link is made of aluminum and has a blue color. To specify the mass distribution and color for the link, use the simscape.multibody.UniformDensity and simscape.multibody.SimpleVisualProperties classes.
mass = UniformDensity(Value(2700,"kg/m^3"));
color = SimpleVisualProperties([0 0 1]);
body = Solid(geometry,mass,color);To add the body to the reference frame of the link object, use the addComponent method.
addComponent(link,"Body","reference",body);
Add Frames and Connectors
Next, add frames and connectors to the RigidBody object. RigidBody objects use frame connectors to connect to other frames or components.
The link object has a reference frame located at the centroid of the body, which serves as the root of its tree structure. When adding new frames to the link object, you must position them relative to the reference frame by using the simscape.multibody.RigidTransform class. Ensure each frame has a unique name.
Use the addFrame method to add a frame to each end of the link, and name them neg_end and pos_end. The axis of the link is along the x-axis of the local reference frame.
offset = length/2; addFrame(link,"neg_end","reference",RigidTransform(StandardAxisTranslation(offset, Axis.NegX))); addFrame(link,"pos_end","reference",RigidTransform(StandardAxisTranslation(offset, Axis.PosX)));
To connect to other frames or components, the frames must function as frame connectors. However, a newly created RigidBody object initially has no connectors. To expose a frame as a frame connector, use the addConnector method.
addConnector(link,"neg_end"); addConnector(link,"pos_end");
To view the structure tree of the link object, use the plotStructure method.
plotStructure(link);
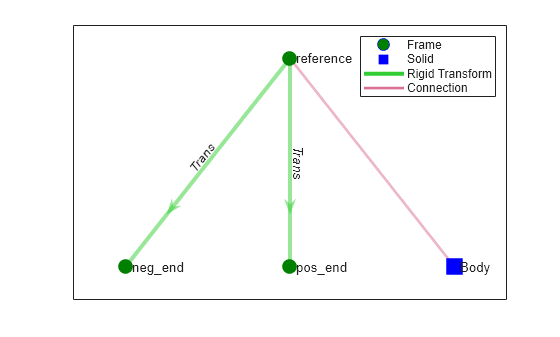
The plot shows that the link object has one solid body and three frames.
See Also
simscape.multibody.Solid | simscape.multibody.RigidBody