Induction Machine Squirrel Cage
Squirrel-cage-rotor induction machine with per-unit or SI parameterization

Libraries:
Simscape /
Electrical /
Electromechanical /
Asynchronous
Description
The Induction Machine Squirrel Cage block models a squirrel-cage-rotor induction machine with fundamental parameters expressed in per-unit or in the International System of Units (SI). A squirrel-cage-rotor induction machine is a type of induction machine. All stator connections are accessible on the block. Therefore, you can model soft-start regimes using a switch between wye and delta configurations. If you need access to the rotor windings, use the Induction Machine Wound Rotor block instead.
Connect port ~1 to a three-phase circuit. To connect the stator in delta configuration, connect a Phase Permute block between ports ~1 and ~2. To connect the stator in wye configuration, connect port ~2 to a Grounded Neutral (Three-Phase) or a Floating Neutral (Three-Phase) block.
Induction Machine Initialization Using Load-Flow Target Values
If the block is in a network that is compatible with the frequency-time simulation mode, you can perform a load-flow analysis on the network. A load-flow analysis provides steady-state values that you can use to initialize the machine.
For more information, see Perform a Load-Flow Analysis Using Simscape Electrical and Frequency and Time Simulation Mode. For an example that shows how initialize an induction machine using data from a load flow analysis, see Induction Motor Initialization with Loadflow.
Equations
For the SI implementation, the block converts the SI values that you enter to per-unit values for simulation. The converted values are based on the machine being connected in a delta-winding configuration.
For the per-unit implementation, you must specify the resistances and inductances in the impedances tab based on the machine being connected in a delta-winding configuration.
For information on the relationship between SI and per-unit machine parameters, see Per-Unit Conversion for Machine Parameters. For information on per-unit parameterization, see Per-Unit System of Units.
The induction machine equations are expressed with respect to a synchronous reference frame, defined by
where frated is the value of the Rated electrical frequency parameter.
The Park transformation maps stator equations to a reference frame that is stationary with respect to the rated electrical frequency. The Park transformation is defined by
where θe is the electrical angle.
The Park transformation is used to define the per-unit induction machine equations. The stator voltage equations are defined by
and
where:
vds, vqs, and v0s are the d-axis, q-axis, and zero-sequence stator voltages, defined by
va, vb, and vc are the stator voltages across ports ~1 and ~2.
ωbase is the per-unit base electrical speed.
ψds, ψqs, and ψ0s are the d-axis, q-axis, and zero-sequence stator flux linkages.
Rs is the stator resistance.
ids, iqs, and i0s are the d-axis, q-axis, and zero-sequence stator currents defined by
ia, ib, and ic are the stator currents flowing from port ~1 to port ~2.
The rotor voltage equations are defined by
and
where:
vdr and vqr are the d-axis and q-axis rotor voltages.
ψdr and ψqr are the d-axis and q-axis rotor flux linkages.
ω is the per-unit synchronous speed. For a synchronous reference frame, the value is 1.
ωr is the per-unit mechanical rotational speed.
Rrd is the rotor resistance referred to the stator.
idr and iqr are the d-axis and q-axis rotor currents.
The stator flux linkage equations are defined by
and
where Lss is the stator self-inductance and Lm is the magnetizing inductance.
The rotor flux linkage equations are defined by
and
where Lrrd is the rotor self-inductance referred to the stator.
The rotor torque is defined by
The stator self-inductance Lss, stator leakage inductance Lls, and magnetizing inductance Lm are related by
The rotor self-inductance Lrrd, rotor leakage inductance Llrd, and magnetizing inductance Lm are related by
When a saturation curve is provided, the equations to determine the saturated magnetizing inductance as a function of magnetizing flux are:
For no saturation, the equation reduces to
Plotting and Display Options
You can perform these plotting and display actions by clicking the associated button next to these parameters in the Utilities section:
Base values — Display the machine per-unit base values in the MATLAB® Command Window.
Torque speed (SI) — Plot torque versus speed, both measured in SI units, in a MATLAB figure window using the current machine parameters.
Torque speed (pu) — Plot torque versus speed, both measured in per-unit, in a MATLAB figure window using the current machine parameters.
Open-Circuit saturation — Plot terminal voltage versus no-load line current, both in per-unit, in a MATLAB figure window. The plot contains three traces:
Unsaturated — Stator magnetizing inductance (unsaturated).
Saturated — Open-circuit lookup table (v versus i) you specify.
Derived — Open-circuit lookup table derived from the per-unit open-circuit lookup table (v versus i) you specify. This data is used to calculate the saturated magnetizing inductance, Lm_sat, and the saturation factor, Ks, versus magnetic flux linkage, ψm, characteristics.
Saturation factor — Plot saturation factor, Ks, versus magnetic flux linkage, ψm, in a MATLAB figure window using the machine parameters. This parameter is derived from other parameters that you specify:
No-load line current saturation data, i
Terminal voltage saturation data, v
Leakage inductance, Lls
Saturated inductance — Plot magnetizing inductance, Lm_sat, versus magnetic flux linkage, ψm, in a MATLAB figure window using the machine parameters. This parameter is derived from other parameters that you specify:
No-load line current saturation data, i
Terminal voltage saturation data, v
Leakage inductance, Lls
For the SI implementation, v is in V (phase-phase RMS) and i is in A (rms).
Model Thermal Effects
You can expose thermal ports to simulate the effects of generated heat and motor temperature. To expose the thermal ports and the Thermal parameters, set the Modeling option parameter to either:
No thermal port— The block contains electrical conserving ports associated with the stator windings, but does not contain thermal ports.Show thermal port— The block contains expanded electrical conserving ports associated with the stator windings and thermal conserving ports for each of the windings and for the rotor.
For more information about using thermal ports in actuator blocks, see Simulating Thermal Effects in Rotational and Translational Actuators.
Generate Derived Data Sheet
Since R2026a
You can generate a derived data sheet for the Induction Machine Squirrel Cage block that contains summary tables and characteristic plots similar to those that device manufacturers provide in their data sheets. A built-in MATLAB script calculates the block-level characteristics based on the parameter values in your model. Use derived data sheets to explore the impact of your parameter choices on device characteristics, help you select manufactured parts, or share your component-level design with other members of your organization.
The derived data sheet for the Induction Machine (Squirrel Cage) block includes plots of:
Torque and line-to-line RMS current versus normalized speed at the rated voltage and frequency.
Torque versus speed at different stator voltages for a constant ratio of voltage to frequency.
To generate a derived data sheet:
Open the MATLAB script by clicking the Open live script button next to the Derived data sheet parameter in the Utilities section of the block dialog box.
Click the Generate Data Sheet button in the script.
For more information about derived data sheets, see Generate Derived Data Sheets.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see System Scaling by Nominal Values.
The type of variables that are visible in the Initial Targets section depends on the initialization method that you select, in the Main section, for the Initialization option parameter. To specify target values using:
Flux variables — Set the Initialization option parameter to
Set targets for flux variables.Data from a load-flow analysis — Set the Initialization option parameter to
Set targets for load flow variables.
If you select
Set targets for load flow variables, to fully specify the initial
condition, you must include an initialization constraint in the form of a high-priority target
value. For example, if your induction machine is connected to an Inertia block, the initial condition for the induction machine is
completely specified if, in the Initial Targets section of the
Inertia block, the
Priority for Rotational velocity is set to
High. Alternatively, you could set the
Priority to None for the Inertia block Rotational velocity, and instead set the
Priority for the induction machine block Slip,
Real power generated, or Mechanical power consumed
to High.
Examples

Control Speed of Induction Machine with Six-Step Method
Control the rotor speed in an asynchronous machine (ASM) drive by using the scalar six-step control method. The control algorithm converts the reference speed to a reference frequency. The controller generates the gate pulses from the reference frequency while maintaining a constant voltage-to-frequency ratio.

Induction Motor Initialization with Loadflow
Initialize a three-phase induction motor as part of a load flow analysis. When initializing an induction machine that is directly connected to an AC network, in steady state there is one degree of freedom which you can set by any one of shaft torque, shaft power, motor speed, or electrical power.
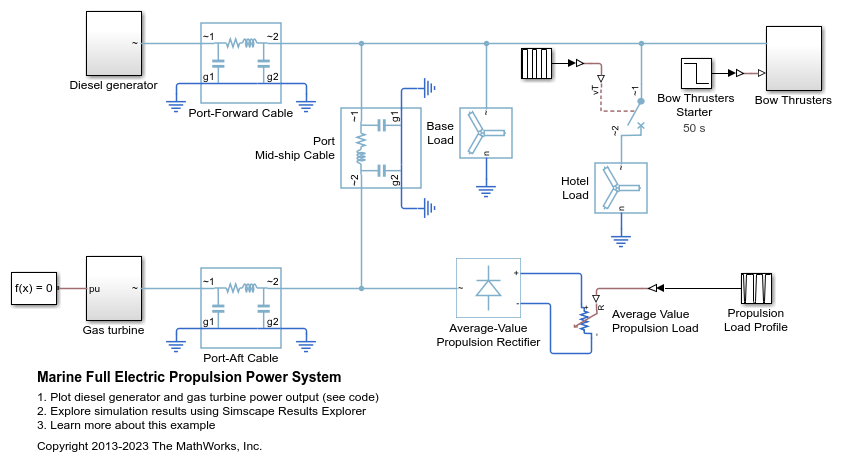
Marine Full Electric Propulsion Power System
A representative marine half-ship electrical power system with base load, hotel load, bow thrusters and electric propulsion.

Three-Phase Asynchronous Direct Online Motor Connected to Hydraulic Pump
In this example, an asynchronous motor is connected to an ideal pump. The diameter of the valve on the hydraulic system affects the speed and current drawn by the motor.

Three-Phase Asynchronous Machine Starting
Model a wye-delta starting circuit for an induction machine. After one second, the Controller subsystem closes the switch labeled S1. Closing this switch connects the supply to the machine. Initially, the machine connects to the supply in a wye configuration because the switch labeled S2 connects each phase of the ~1 port to the corresponding phase of the ~2 port and leaves the ~3 port unconnected. Once the machine is at 80% of the synchronous speed, S2 reconnects the machine in a delta configuration by disconnecting each phase of ~2 and connecting each phase of ~1 to the corresponding phase of ~3. The motor then operates in a delta configuration regardless of rotor speed. The supply sees a higher impedance when the motor is in wye configuration, reducing the starting current and causing less disruption to other connected loads.

Three-Phase Asynchronous Wind Turbine Generator
Model an induction machine used as a wind turbine generator.

Three-Phase Asynchronous Drive with Sensor Control
Control and analyze the operation of an Asynchronous Machine (ASM) using sensored rotor field-oriented control. The model shows the main electrical circuit, with three additional subsystems containing the controls, measurements, and scopes. The Controls subsystem contains two controllers: one for the Grid-Side Converter (AC/DC) and one for the Machine-Side Converter (DC/AC). The Scopes subsystem contains two time scopes: one for the Grid-Side Converter and one for the ASM. When the model is executed, a Spectrum Analyzer opens and displays frequency data for the A-Phase Supply Current.

Three-Phase Asynchronous Drive with Sensorless Control
Control and analyze the operation of an Asynchronous Machine (ASM) using sensorless rotor field-oriented control. The model shows the main electrical circuit, with three additional subsystems containing the controls, measurements, and scopes. The Controls subsystem contains two controllers: one for the Grid-Side Converter (AC/DC) and one for the Machine-Side Converter (DC/AC). The Scopes subsystem contains two time scopes: one for the Grid-Side Converter and one for the ASM. When the model is executed, a Spectrum Analyzer opens and displays frequency data for the A-Phase Supply Current.

Torque Control in Three-Level Converter-Fed Asynchronous Machine Drive
Control the torque in an asynchronous machine (ASM) based electrical-traction drive. A high-voltage battery feeds the ASM through a three-phase three-level neutral-point clamped controlled converter. The ASM operates in both motoring and generating modes. An ideal angular velocity source provides the load. The Control subsystem uses the field-oriented control strategy to control the flux and torque. The current control is PI-based. A proportional controller regulates the neutral point voltage. The simulation uses several torque steps in both motor and generator modes. The Scopes subsystem contains scopes that allow you to see the simulation results.

Control Speed of Induction Machine with Direct Torque Control Method
Control an asynchronous machine (ASM) using the direct-torque control method. A PI-based speed controller supplies the torque reference. The direct-torque controller generates the inverter pulses.

Asynchronous Machine Direct Torque Control with Space Vector Modulator
Control an asynchronous machine (ASM) using the direct-torque control method with space vector modulator. A PI-based speed controller supplies the torque reference. The direct-torque controller generates the reference voltages required by the space vector modulator. A DC voltage source feeds the ASM through a controlled average-value voltage source converter.

Asynchronous Machine Scalar Control
Control the rotor speed in an asynchronous machine (ASM) drive using the scalar V/f control method. The converter transforms a reference speed to a reference electrical frequency. The controller generates reference voltages from the reference frequency by maintaining a constant voltage-to-frequency ratio through scalar V/f control.
Ports
Input
Conserving
Parameters
References
[1] Kundur, P. Power System Stability and Control. New York: McGraw Hill, 1993.
[2] Lyshevski, S. E. Electromechanical Systems, Electric Machines and Applied Mechatronics. Boca Raton, FL: CRC Press, 1999.
[3] Ojo, J. O., Consoli, A.,and Lipo, T. A., "An improved model of saturated induction machines", IEEE Transactions on Industry Applications. Vol. 26, no. 2, pp. 212-221, 1990.
Extended Capabilities
Version History
Introduced in R2013bSee Also
Simscape Blocks
Blocks
- Induction Machine Current Controller | Induction Machine Direct Torque Control | Induction Machine Direct Torque Control with Space Vector Modulator | Induction Machine Field-Oriented Control | Induction Machine Flux Observer | Induction Machine Scalar Control | Induction Machine Direct Torque Control (Single-Phase) | Induction Machine Field-Oriented Control (Single-Phase)