Sinusoidal Measurement (PLL)
Estimate sinusoidal characteristics using a phase-locked loop
Libraries:
Simscape /
Electrical /
Control /
Measurements
Description
The Sinusoidal Measurement (PLL) block estimates the frequency, phase angle, and magnitude of a single-phase sinusoidal signal or individual phases of a multiphase sinusoidal signal. The block uses an enhanced phase-locked loop (PLL) strategy to estimate these sinusoidal characteristics of the input signal.
Use this block in control applications when the frequency, phase angle, or magnitude is required and cannot be measured directly. To provide faster phase locking for balanced three-phase input signals, use the Three-Phase Sinusoidal Measurement (PLL) block.
Equations
The phase-locked loop generates a sinusoid that approximates the input signal u(t) with the form:
where:
y is the estimate of the input signal.
A is the estimate of the amplitude of the input signal.
ϕ0 is the initial phase angle of the input signal.
The estimated phase angle ϕ is the angle of this generated sinusoid:
where f if the frequency of the sinusoid, and ϕ0 is the initial phase angle.
This diagram shows the overall structure of the phase-locked loop.
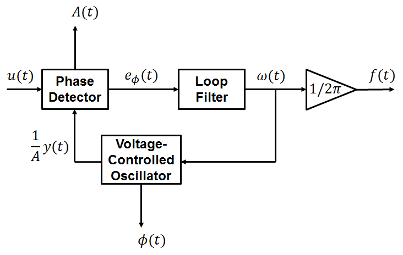
In the diagram:
The phase detector produces an error signal relative to the phase difference eϕ between the input sinusoid u and the synthesized sinusoid y. It also outputs an estimate of the amplitude A.
The loop filter provides an estimate of the input angular frequency ω by filtering out the high-frequency components of the phase difference. The block also outputs the converted frequency f in Hz.
The voltage-controlled oscillator integrates the angular speed to produce the phase estimate ϕ. The oscillator also generates the normalized synthesized sinusoid (1/A)y which it sends to the Phase Detector for comparison.
Examples

Implement Power Factor Correction for CCM Boost Converter
Correct the power factor using a PFC pre-converter. This technique is useful when non-linear impedances, such as switch mode power supplies, connect to an AC grid. As the current flowing through the inductor is never zero during the switching cycle, the boost converter operates in continuous conduction mode (CCM). The inductor current and the output voltage profiles are controlled using proportional-integral control. During start up, the reference output voltage is ramped up to the desired voltage.
Assumptions and Limitations
The input signal, u, must not have a DC bias and must be in this form:
Ports
Input
Output
Parameters
References
[1] Karimi-Ghartemani, M., and M. R. Iravani. "A New Phase-Locked Loop (PLL) System." IEEE Transactions on Industrial Electronics. Proceedings of the 44th IEEE Symposium on Circuits and Systems, vol. 1, pp. 421-424. IEEE, 2001..
Extended Capabilities
Version History
Introduced in R2017b