Prototipazione con sensore di prossimità sonar
Questo esempio mostra come realizzare un prototipo con ThingSpeak ™ utilizzando una scheda Arduino® connessa tramite Wi-Fi.
È possibile leggere e scrivere i dati del canale con la libreria di comunicazione ThingSpeak. In questo esempio, una soglia regolabile viene letta da ThingSpeak per creare un rilevatore di prossimità. L'hardware è costituito da un Arduino MKR100 con un sensore sonar e un LED indicatore per indicare la presenza di un oggetto.
La prototipazione di un progetto di sensore può richiedere più rielaborazioni del codice per ottimizzare i parametri di calibrazione, come quelli per un sensore di temperatura. Una modifica hardware aggiunge complessità, riduce l'affidabilità e può essere difficile da realizzare quando il progetto viene implementato. In alternativa, è possibile leggere i parametri di calibrazione da ThingSpeak e modificarli in tempo reale. È possibile migliorare la qualità delle misurazioni regolando un parametro di sintonizzazione memorizzato su ThingSpeak.
Hardware supportato
Arduino MKR1000
Arduino Uno, Mega, Due o Leonardo con una rete wireless o una connessione Ethernet
Particella Fotone (con alcuni aggiustamenti al codice e allo schema)
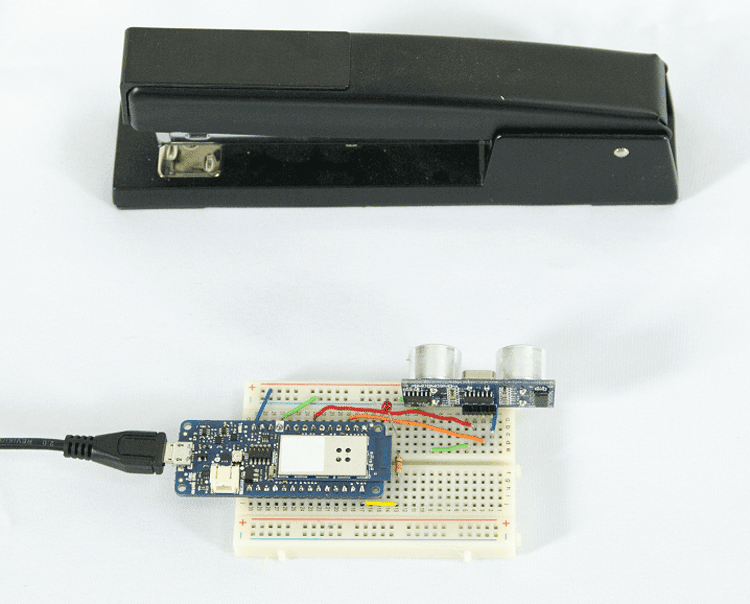
In questo esempio, un sensore sonar monitora una pinzatrice e invia la misurazione al tuo canale. Il sensore sonar funziona inviando un impulso sonoro e misurando il tempo impiegato dall'impulso per tornare indietro da un oggetto. Il sistema utilizza la soglia di distanza letta da ThingSpeak e confronta la soglia con la distanza misurata. Il LED è acceso quando la cucitrice è presente.
Dopo aver completato questo esempio, vedrai i dati di prossimità e le impostazioni nel tuo canale. La vista del canale ThingSpeak mostra i seguenti dati e impostazioni di prossimità:
La soglia è impostata a 15 cm
Per ogni media vengono effettuate dieci misurazioni
Il flag di lettura è impostato per forzare la lettura dei parametri di calibrazione
I dati mostrano che qualcuno ha "preso in prestito" la spillatrice alle 11 del mattino, restituendola più tardi in una nuova posizione

Hardware richiesto
Arduino MKR1000 o altro Arduino con connessione di rete Ethernet o wireless
Sensore sonar HC-SR04
Cavi jumper (almeno 4)
GUIDATO
Piccolo resistore (100 Ω – 1 kΩ)
Cavo USB
Impostazione del canale
1) Creare un canale ThingSpeak, come mostrato in Raccogliere dati in un nuovo canale. Memorizzare i dati nel primo campo e memorizzare le impostazioni del dispositivo nei campi successivi. Le impostazioni del dispositivo includono la soglia di distanza, il numero di misurazioni da calcolare in media e un flag per controllare se il dispositivo aggiorna le impostazioni a ogni ciclo.
2) Abilitare i campi 1, 2, 3 e 4 nella vista Impostazioni canale. Per distinguere i campi, fornire un nome descrittivo per ciascun campo. Questa immagine mostra un singolo canale configurato per raccogliere dati nel primo campo e memorizzare i parametri di calibrazione nei campi 2, 3 e 4.
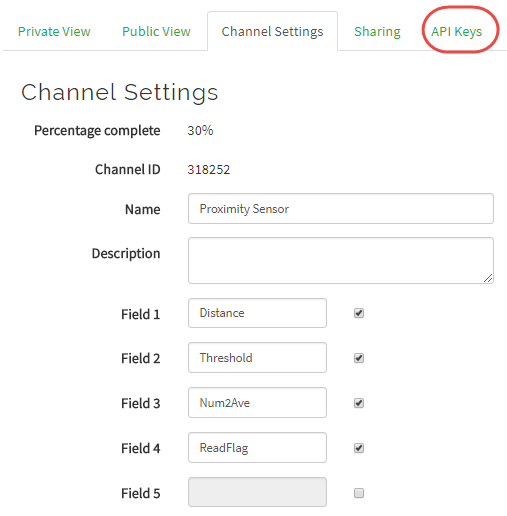
3) Annotare le chiavi API di lettura e scrittura appropriate dalla scheda Chiavi API nella vista Impostazioni canale (evidenziate nell'immagine).
4) Compilare i campi di calibrazione utilizzando una finestra del browser. Puoi copiare il testo dalla scheda Chiavi API o modificarlo con la tua chiave API di scrittura. Inserisci ogni URL direttamente nella barra degli indirizzi del tuo browser, modificando LA TUA CHIAVE API DI SCRITTURA con la chiave API di scrittura per il tuo canale.
UN. Imposta la soglia per il rilevamento di un oggetto (50 cm è un buon punto di partenza):
https://api.thingspeak.com/update?api_key=YOUR WRITE API KEY&field2=THRESHOLD
B. Imposta il numero di misurazioni come media:
https://api.thingspeak.com/update?api_key=YOUR WRITE API KEY&field3=NUMTOAVERAGE
c. Imposta il flag di controllo in modo che il dispositivo verifichi periodicamente la presenza di nuove impostazioni:
https://api.thingspeak.com/update?api_key=YOUR WRITE API KEY&field4=1
Il browser restituisce il numero di voci nel canale. Se hai appena creato il canale, vedrai 1, 2 e 3 quando compili i tre campi di calibrazione richiesti.
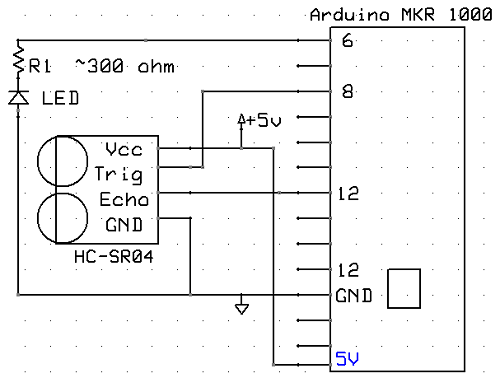
Schema e connessioni
1) Collegare VCC a 5 V sull'MKR-1000.
2) Collegare la massa del sensore alla massa dell'Arduino.
3) Collegare il pin Trig al pin 8 di Arduino.
4) Collegare il pin Echo al pin 12 di Arduino.
5) Collegare un resistore al pin 5 di Arduino e collegare il resistore a un LED indicatore. Collegare l'anodo del LED a terra.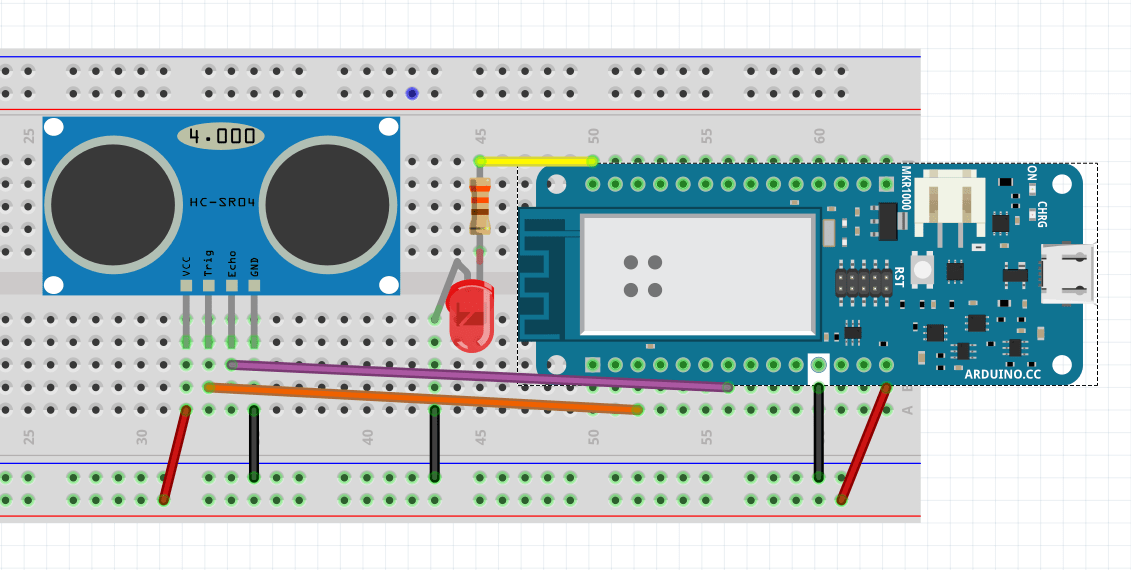
Programma il tuo Arduino
1) Scarica l'ultima versione di Arduino IDE.
2) Aggiungere la libreria ThingSpeak per Arduino ed ESP8266 al gestore delle librerie. Selezionare Sketch > Include Library > Manage Libraries. Seleziona ThingSpeak per aggiungerlo al tuo schizzo.
3) Aggiungere la libreria WiFi101 nel gestore delle librerie. Nota: Assicurati di installare la versione 0.13 della libreria. Nella versione 0.14 è presente un bug che impedisce la pubblicazione dei post. Selezionare Sketch > Include Library > Manage Libraries. Seleziona WiFi101 per aggiungerlo al tuo schizzo.
4) Creare l'applicazione. Apri una nuova finestra nell'IDE di Arduino e salva il file. Aggiungere il codice fornito nella sezione Codice. Assicurati di modificare le informazioni sulla rete wireless, l'ID del canale e le chiavi API.
5) Dopo aver caricato correttamente il programma, è possibile monitorare l'output utilizzando il monitor seriale. Se un oggetto è presente a una distanza inferiore alla soglia impostata, il dispositivo invia la distanza al canale. Prova a sperimentare con il numero di misurazioni di cui calcolare la media e osserva come cambiano le fluttuazioni misurate. Dopo aver impostato i parametri, è possibile modificare il valore del flag di lettura da 1 a 0. Una volta che il dispositivo legge questo flag come 0, interrompe il controllo dei parametri su ThingSpeak, risparmiando energia e larghezza di banda.
Codice
1) Includere le librerie e inizializzare i pin di controllo.
#include <ThingSpeak.h> #include<WiFi101.h> #define triggerPin 8 #define echoPin 12 #define LEDpin 6
2) Definire e inizializzare le variabili. Assicurati di modificare le informazioni sulla rete wireless, l'ID del canale e le chiavi API. Trova l'ID del tuo canale nella parte superiore della pagina principale del tuo canale.
// Network information const char* ssid = "SSID"; const char* password = "xxxxxxxxxx"; // ThingSpeak information char* writeAPIKey = "XXXXXXXXXXXXXXXX"; char* readAPIKey = "YYYYYYYYYYYYYYYY"; const long channelID = 000000; const unsigned int firstReadFieldNumber = 2; const unsigned int secondReadFieldNumber = 3; const unsigned int switchField = 4; // Field number (1-8) to use to change status of device. Determines if data is read from ThingSpeak. // Other constants const unsigned long postingInterval = 60L * 1000L; // Post data every 60 seconds // Global variables unsigned long lastConnectionTime = 0; long lastUpdateTime = 0; float distanceThreshold = 0; bool getInfo = 1; // Set this to zero if you don’t want to read data from ThingSpeak anymore (i.e. calibration complete) int points = 7; WiFiClient client;
3) Inizializzare i pin per l'input e l'output e leggere i parametri di calibrazione per la prima volta nella routine setup.
void setup() {
Serial.begin (9600);
pinMode(triggerPin, OUTPUT);
pinMode(LEDpin, OUTPUT);
pinMode(echoPin, INPUT);
connectWifi();
Serial.println("Start");
// Get the initial parameters from ThingSpeak.
distanceThreshold = readTSData(channelID,firstReadFieldNumber,readAPIKey);
points = readTSData(channelID,secondReadFieldNumber,readAPIKey);
}
4) Ogni volta che viene eseguito il ciclo principale, effettuare più misurazioni. Se i dati non vengono scritti su ThingSpeak per un po', scriverli sul canale di uscita. Inoltre, se l'ultima lettura del flag è stata eseguita come vera, controllare i dati di calibrazione e i flag in ogni ciclo.
void loop() {
float distance=0;
// Make sure there is an Internet connection.
if(WiFi.status() != WL_CONNECTED){
connectWifi();
}
for (uint16_t loops = 0; loops < points; loops++){
distance += getDistance(triggerPin,echoPin); //make a measurement, store the sum of all measurements
delay(5);
}
distance = distance/points;
if (distance < distanceThreshold){
digitalWrite(LEDpin,HIGH);
}
else{
digitalWrite(LEDpin,LOW);
}
Serial.println("Ave: "+ String(distance)+ " cm");
if (millis() - lastUpdateTime >= postingInterval) {
lastUpdateTime = millis();
if (!(getInfo==0)){
distanceThreshold = readTSData(channelID,firstReadFieldNumber,readAPIKey);
points = readTSData(channelID,secondReadFieldNumber,readAPIKey);
getInfo = (bool)readTSData(channelID,switchField,readAPIKey);
}
if (distance < distanceThreshold){
// Write data to ThingSpeak channel.
writeTSData(channelID, 1, distance, writeAPIKey);
}
}
delay(500); // Provide some delay between measurements.
}
5) Utilizzare queste funzioni per leggere e scrivere dati da e verso ThingSpeak.
int writeTSData(long TSChannel,unsigned int TSField,float data,char* ReadAPIKey){
int writeSuccess = ThingSpeak.writeField(TSChannel, TSField, data, writeAPIKey); //write the data to the channel
return writeSuccess;
}
// Use this function if you want multiple fields simultaneously.
/*
int writeTDData(long TSChannel,unsigned int TSField1,float data1,unsigned int TSField2,data2,char* ReadAPIKey){
ThingSpeak.setField(TSField1,data1);
ThingSpeak.setField(TSField1,data2);
writeSuccess = ThingSpeak.writeFields(TSChannel, writeAPIKey);
return writeSuccess;
}
*/
float readTSData(long TSChannel,unsigned int TSField,char* ReadAPIKey){
float data = 0;
data = ThingSpeak.readFloatField(TSChannel,TSField,ReadAPIKey);
Serial.println(" Data read from ThingSpeak "+String(data));
return data;
}
6) Utilizzare getDistance per ottenere una singola misurazione dal sensore.
float getDistance(int tPin,int ePin){
long duration, distance;
digitalWrite(tPin, LOW); // Reset the trigger pin.
delayMicroseconds(2);
digitalWrite(tPin, HIGH); // Start a measurement.
delayMicroseconds(10); //
digitalWrite(tPin, LOW); // Complete the pulse.
duration = pulseIn(ePin, HIGH); // Wait for a reflection pulse.
distance = (duration/2) / 29.1; // Calculate the appropriate distance using the estimated speed of sound.
// This section is useful when debugging the sensor.
/*
if (distance >= 200 || distance <= 0){
Serial.println("Out of range");
}
else {
Serial.print(distance);
Serial.println(" cm");
}
*/
return distance;
}
7) Collega il tuo dispositivo a una rete wireless utilizzando la funzione connectWiFi.
int connectWifi(){
while (WiFi.status() != WL_CONNECTED) {
WiFi.begin(ssid, password);
delay(2500);
Serial.println("Connecting to WiFi");
}
Serial.println("Connected");
ThingSpeak.begin(client);
}