createPX4uORBMessage
Description
Add-On Required: This feature requires the UAV Toolbox Support Package for PX4 Autopilots add-on.
createPX4uORBMessage(
creates a custom uORB topic for logging in a Simulink® model running on a Pixhawk® hardware board.messageName,uORBFields)
A custom uORB message refers to a user-defined message format in the uORB (micro Object Request Broker) messaging system. uORB is a publish-subscribe messaging system used in the PX4 autopilot software for communication between different modules and components.
Examples
Create a new custom uORB message
MyCustomMessage, with the required datatype and corresponding
signal names
This example shows the functioning of the API with the changes that are being made in the Firmware.
To do this, enter the following command at the MATLAB® command prompt after the model has successfully run on the hardware:
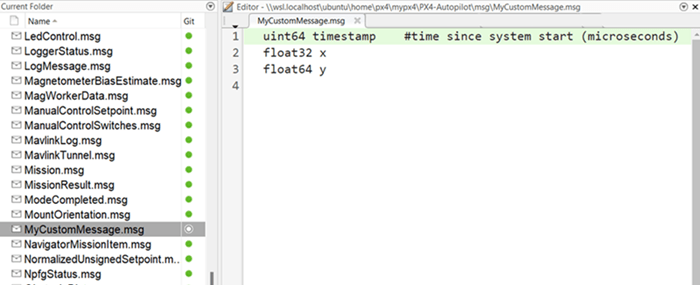
createPX4uORBMessage('MyCustomMessage', 'float32 x', 'float64 y')
This creates a new message MyCustomMessage.msg with the
mentioned fields x and y, with their
datatype. Then, the message is included in the specified firmware directory.
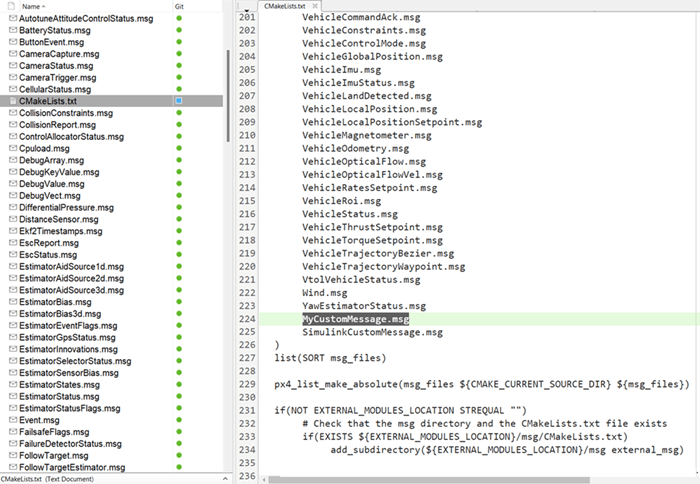
It also updates the CMakeLists.txt with the newly created message as shown below.
To use this custom uORB message, build the PX4 firmware using the Hardware Setup Screen.
Input Arguments
Version History
Introduced in R2023b