opticalFlowLK
Object for estimating optical flow using Lucas-Kanade method
Description
Create an optical flow object for estimating the direction and speed of a moving
object using the Lucas-Kanade method. Use the object function estimateFlow to estimate the optical flow vectors. Using the reset object function, you can reset the internal state of the optical flow
object.
Creation
Description
opticFlow = opticalFlowLK
opticFlow = opticalFlowLK('NoiseThreshold',threshold)'NoiseThreshold'
specified as a Name,Value pair. Enclose the property name in
quotes.
For example, opticalFlowLK('NoiseThreshold',0.05)
Properties
Object Functions
estimateFlow | Estimate optical flow |
reset | Reset the internal state of the optical flow estimation object |
Examples
Read a video file. Specify the timestamp of the frame to be read.
vidReader = VideoReader('visiontraffic.avi','CurrentTime',11);
Create an optical flow object for estimating the optical flow using Lucas-Kanade method. Specify the threshold for noise reduction. The output is an optical flow object specifying the optical flow estimation method and its properties.
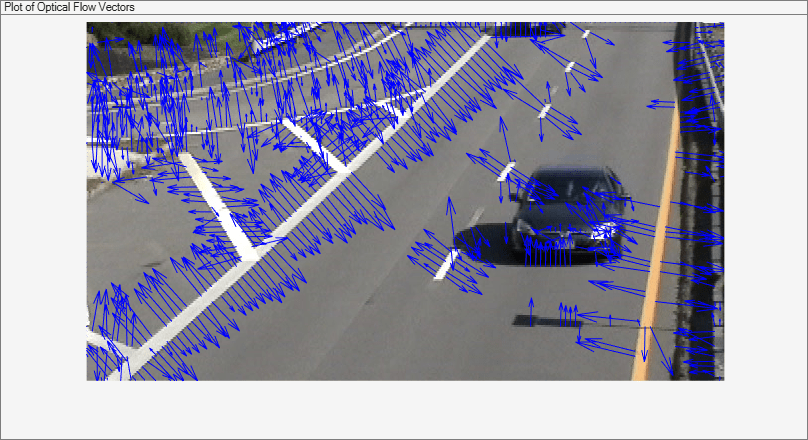
opticFlow = opticalFlowLK('NoiseThreshold',0.009);Create a custom figure window to visualize the optical flow vectors.
h = figure; movegui(h); hViewPanel = uipanel(h,'Position',[0 0 1 1],'Title','Plot of Optical Flow Vectors'); hPlot = axes(hViewPanel);
Read the image frames and convert to grayscale images. Estimate the optical flow from consecutive image frames. Display the current image frame and plot the optical flow vectors as quiver plot.
while hasFrame(vidReader) frameRGB = readFrame(vidReader); frameGray = im2gray(frameRGB); flow = estimateFlow(opticFlow,frameGray); imshow(frameRGB) hold on plot(flow,'DecimationFactor',[5 5],'ScaleFactor',10,'Parent',hPlot); hold off pause(10^-3) end

Algorithms
References
[1] Barron, J. L., D. J. Fleet, S. S. Beauchemin, and T. A. Burkitt. “ Performance of optical flow techniques.” In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR),236-242. Champaign, IL: CVPR, 1992.
Extended Capabilities
Version History
Introduced in R2015a
See Also
opticalFlowRAFT | quiver | opticalFlow | opticalFlowHS | opticalFlowFarneback | opticalFlowLKDoG