Bilateral Filter
2-D bilateral filtering
Libraries:
Vision HDL Toolbox /
Filtering
Description
The Bilateral Filter block filters images while preserving edges. Some applications of bilateral filtering are denoising while preserving edges, separating texture from illumination, and cartooning to enhance edges. The filter replaces each pixel at the center of a neighborhood by an average that is calculated using spatial and intensity Gaussian filters. The block determines the filter coefficients from:
Spatial location in the neighborhood (similar to a Gaussian blur filter)
Intensity difference from the neighborhood center value
The block provides two standard deviation parameters for independent control of the spatial and intensity coefficients.
Examples

Generate Cartoon Images Using Bilateral Filtering
Generate cartoon lines and overlay them onto an image.
Ports
This block uses a streaming pixel interface with a
pixelcontrol bus for frame control signals. This interface enables the
block to operate independently of image size and format. All Vision HDL Toolbox™ blocks use the same streaming interface. The block accepts and returns a scalar
pixel value and a bus that contains five control signals. The control signals indicate the
validity of each pixel and its location in the frame. To convert a frame (pixel matrix) into a
serial pixel stream and control signals, use the Frame
To Pixels block. For a full description of the interface, see Streaming Pixel Interface.
Input
Output
Parameters
Tips
When you use a block with an internal line buffer inside an Enabled Subsystem (Simulink), the enable signal pattern must maintain the timing of the pixel stream, including the minimum blanking intervals. If the enable pattern corrupts the timing of the pixel stream, you might see partial output frames, corrupted pixel stream control signals, or mismatches between Simulink® and HDL simulation results. You may need to extend the blanking intervals to accommodate for cycles when the enable is low. For more information, see Configure Blanking Intervals.
Algorithms
The bilateral filter can be described as a Gaussian filter in the spatial dimension that modifies the coefficients of a second Gaussian filter that operates on intensity.
The algorithm stores N-1 lines so that it can form an N-by-N matrix of pixels matching the Neighborhood size. Then it applies two Gaussian filters on each neighborhood. The filter coefficients are calculated from the spatial and intensity standard deviations.
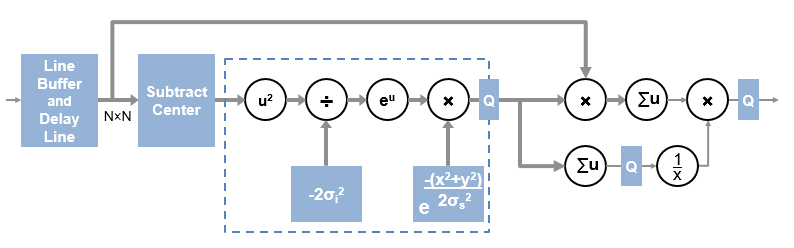
The Subtract Center operation produces a pixel value of zero at the center of the neighborhood. For hardware implementation, and for simulation of fixed-point or integer data types, the calculation in the dashed region is implemented with a lookup table of precomputed values for each pixel. Because the center value is always zero, u2 and eu are always one and are not computed. For floating-point input, the simulation computes u2 and eu as shown. The output of the dashed region uses the coefficient data type that you specified. The Q blocks in the diagram show quantization points.
The algorithm implements the final normalization step with a reciprocal lookup table
in the hardware implementation. The lookup table has 2048 locations, so the coefficient
sum is quantized to the most significant 11 bits. The reciprocal values use the output
data type that you specified, plus a minimum of two integer bits if the data type does
not already include them. The reciprocal lookup value for a zero sum is the maximum
representable value in the coefficient data type. For floating-point normalization, the
simulation detects a zero sum and instead divides by eps() of the
dividend.
The output pixel value is then cast to the output data type that you specified. The filter uses the entire range of the data type, so if your color space uses less than the full range, you may need to rescale the pixel values.
Note
When filtering multicomponent (color) pixels, false colors can occur, unless the operation is done in a color space based on human perception, such as CIELab. Bilateral filtering of the R'G'B' color space is not recommended.
The latency of the block is the line buffer latency plus the
latency of the kernel calculation. The line buffer latency includes edge padding by default. The
latency of the padding operation depends on the size of the kernel. If edge padding is not
necessary for your design, you can reduce the latency by setting the Padding
method parameter to None. When you use this option, the block
latency does not depend on your kernel size. To determine the exact latency for any
configuration of the block, measure the number of time steps between the input and output
control signals.

Note
When you use edge padding, use a horizontal blanking interval of at least twice the kernel width. This interval lets the algorithm finish processing one line before it starts processing the next one, including adding padding pixels before and after the active pixels in the line.
The horizontal blanking interval is equal to TotalPixelsPerLine – ActivePixelsPerLine or, equivalently, FrontPorch + BackPorch. Standard streaming video formats use a horizontal blanking interval of about 25% of the frame width. This interval is much larger than the filters applied to each frame.
The horizontal blanking interval must also meet these minimums:
If the kernel size is less than 4, and you use edge padding, the total porch must be at least 8 pixels.
When you disable edge padding, the horizontal blanking interval must be at least 12 cycles and is independent of the kernel size.
The BackPorch must be at least 6 pixels. This parameter is the number of inactive pixels before the first valid pixel in a frame.
For more information, see Configure Blanking Intervals.