Swash Plate

Libraries:
Simscape /
Fluids /
Isothermal Liquid /
Pumps & Motors /
Auxiliary Components
Description
The Swash Plate block models a single, piston-actuated swash plate within an axial-piston pump. It translates linear actuation into rotational motion that, when connected to the Valve Plate Orifice (IL) block, periodically connects the piston with the pump intake and discharge. You can connect multiple swash plate blocks to multiple pistons.
Schematic of a Swash Plate Within an Axial-Piston Pump Unit
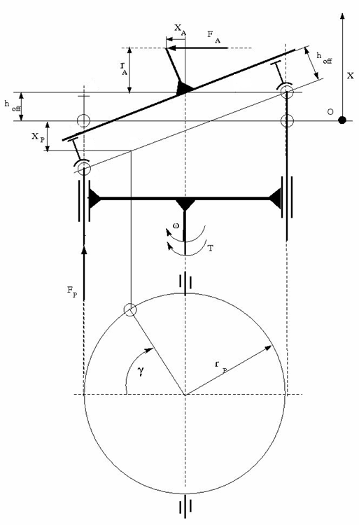
Force Balance
The plate is in dynamic equilibrium if the net work by the piston, actuator, and plate is zero:
where:
FPδP is the work done due to piston displacement.
FAδA is the work done due to actuator displacement.
(τ-τres)δy is the work done due to the net plate torque tangent to plate motion.
The plate torque is:
where:
rP is the Cylinder block pitch radius.
rA is the Swash plate actuator arm.
XA is the actuator displacement.
FP is the piston force.
γ is the plate angular displacement.
The viscous friction torque, or the resistance to motion due to plate-piston contact, is:
where:
μviscous is the Viscous friction coefficient.
ω is the rotor angular velocity.
Piston Dynamics
The piston displacement, x, is proportional to the actuator displacement:
where hoff is the Piston offset from the plate. Displacement is positive if it moves toward the cylinder block.
The piston velocity is:
where VA is the actuator velocity.
Assumptions and Limitations
This block accounts for the effect of viscous friction between the piston and plate, but neglects plate and fluid inertia.

Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2020a
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)