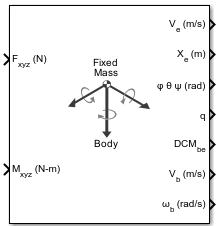
6DOF (Quaternion)
Implement quaternion representation of six-degrees-of-freedom equations of motion with respect to body axes
Libraries:
Aerospace Blockset /
Equations of Motion /
6DOF
Alternative Configurations of 6DOF (Quaternion) Block:
Simple Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF (Quaternion)
Description
The 6DOF (Quaternion) block implements quaternion representation of six-degrees-of-freedom equations of motion with respect to body axes. For a description of the coordinate system and the translational dynamics, see the block description for the 6DOF (Euler Angles) block.
For more information on the integration of the rate of change of the quaternion vector, see Algorithms.
The 6DOF (Quaternion), Simple Variable Mass 6DOF (Quaternion), and Custom Variable Mass 6DOF (Quaternion) blocks are alternative configurations of the same block.
6DOF (Quaternion) — Implement quaternion representation of six-degrees-of-freedom equations of motion with respect to body axes
Simple Variable Mass 6DOF (Quaternion) — Implement quaternion representation of six-degrees-of-freedom equations of motion of simple variable mass with respect to body axes
Custom Variable Mass 6DOF (Quaternion) — Implement quaternion representation of six-degrees-of-freedom equations of motion of custom variable mass with respect to body axes
Limitations
The block assumes that the applied forces act at the center of gravity of the body, and that the mass and inertia are constant.
Ports
Input
Output
Parameters
Alternative Configurations
Algorithms
The integration of the rate of change of the quaternion vector is given below. The gain K drives the norm of the quaternion state vector to 1.0 should become nonzero. You must choose the value of this gain with care, because a large value improves the decay rate of the error in the norm, but also slows the simulation because fast dynamics are introduced. An error in the magnitude in one element of the quaternion vector is spread equally among all the elements, potentially increasing the error in the state vector.
Aerospace Blockset™ uses quaternions that are defined using the scalar-first convention.
Extended Capabilities
Version History
Introduced in R2006aSee Also
6DOF (Euler Angles) | 6DOF ECEF (Quaternion) | 6DOF Wind (Quaternion) | 6DOF Wind (Wind Angles) | Custom Variable Mass 6DOF (Euler Angles) | Custom Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF ECEF (Quaternion) | Custom Variable Mass 6DOF Wind (Quaternion) | Custom Variable Mass 6DOF Wind (Wind Angles) | Simple Variable Mass 6DOF (Euler Angles) | Simple Variable Mass 6DOF (Quaternion) | Simple Variable Mass 6DOF ECEF (Quaternion) | Simple Variable Mass 6DOF Wind (Quaternion) | Simple Variable Mass 6DOF Wind (Wind Angles)