Multirotor
Description

Multirotor is one of the rotorcraft that you can use within the 3D simulation environment. This topic describes two provided sample multirotor rotorcraft, Quadcopter and Mini Quadcopter. This environment is rendered using the Unreal Engine® from Epic Games®. This topic provides detailed views for two multirotors, a quadcopter and a mini quadcopter. For more information, see Views.
To add this type of vehicle to the 3D simulation environment:
Add a Simulation 3D Rotorcraft block to your Simulink® model.
In the Block Parameters dialog box, on the Parameters tab, set the Type parameter to
Multirotor.Set the Initial translation (m) and Initial rotation (rad) parameters to an array size that matches Multirotor rotorcraft, for example,
zeros(11, 3).
Data for Multirotor Placement for Quadcopter
The Quadcopter sample mesh origin is at ground level. To correctly
place the rotorcraft, consider using these values.
Airport Scene Placement
To place the Quadcopter mesh in the Airport scene
resting on the pavement or other hard surface, which is at a Z of 1
centimeter, use the following body translation and rotation values.
| Body Motion Ports and Parameters | Value |
|---|---|
| Translation port and Initial translation parameter | [0, 0, 0] + [0, 0, -0.01] |
| Rotation port and Initial rotation parameter | [0, 0, 0] |
Altitude Sensor
For the altitude sensor in the Simulation 3D Rotorcraft block, use these values.
| Parameter | Value |
|---|---|
| Body Z offset (m) | 0.0934 |
| Ground contact location 1 (m) | [0.1833, 0.1833, 0.0934] |
| Ground contact location 2 (m) | [-0.1833, 0.1833, 0.0934] |
| Ground contact location 3 (m) | [-0.1833, -0.1833, 0.0934] |
| Ground contact location 4 (m) | [0.1833, -0.1833, 0.0934] |
Size
These are the unscaled sizes of the generic quadcopter mesh.
| Parameter | Value |
|---|---|
| Length (m) | 0.400 |
| Width (m) | 0.400 |
| Height (m) | 0.164 |
| Rotor Diameter (m) | 0.264 |
Data for Multirotor Placement for Mini Quadcopter
The Mini Quadcopter sample mesh origin is at ground level. To correctly
place the rotorcraft, consider using these values.
Airport Scene Placement
To place the Mini Quadcopter mesh in the Airport
scene resting on the pavement or other hard surface, which is at a Z of 1
centimeter, use the following body translation and rotation values.
| Body Motion Ports and Parameters | Value |
|---|---|
| Translation port and Initial translation parameter | [0, 0, 0] + [0, 0, -0.01] |
| Rotation port and Initial rotation parameter | [0, 0, 0] |
Altitude Sensor
For the altitude sensor in the Simulation 3D Rotorcraft block, use these values.
| Parameter | Value |
|---|---|
| Body Z offset (m) | 0.0889 |
| Ground contact location 1 (m) | [0.042, 0.042, 0.0889] |
| Ground contact location 2 (m) | [-0.042, 0.042, 0.0889] |
| Ground contact location 3 (m) | [-0.042, -0.042, 0.0889] |
| Ground contact location 4 (m) | [0.042, -0.042, 0.0889] |
Size
These are the unscaled sizes of the generic mini quadcopter mesh.
| Parameter | Value |
|---|---|
| Length (m) | 0.177 |
| Width (m) | 0.177 |
| Height (m) | 0.106 |
| Main Rotor Diameter (m) | 0.066 |
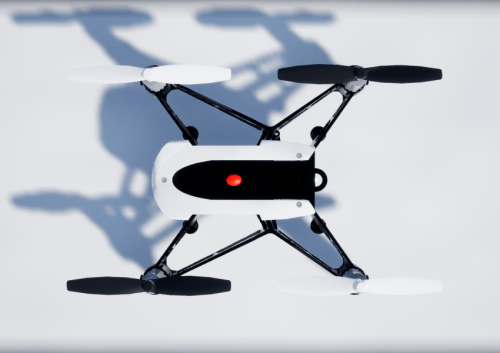
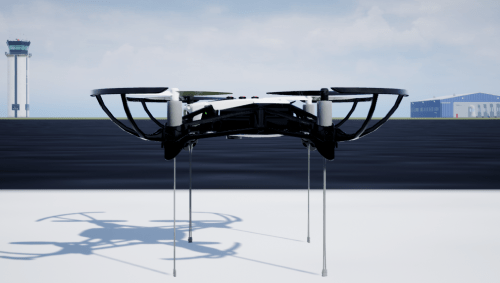
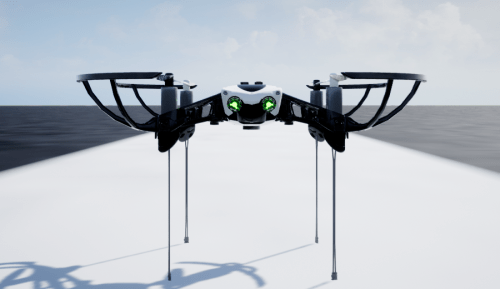
Views
Quadcopter


Mini Quadcopter

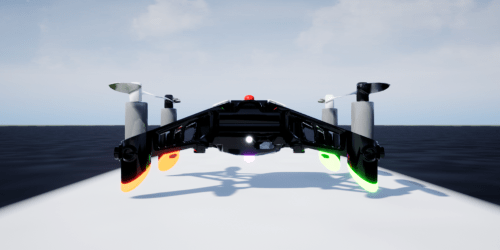
Lights and Skeleton
Lights
| Light | Bone |
|---|---|
| Landing light | LandingLight |
| Nose light | NoseLight |
| Red navigation light | RedNavLight |
| Green navigation light | GreenNavLight |
| White navigation light | PositionLight |
| Strobe light | StrobeLight |
| Beacon light | BeaconLight |
Skeleton
MultirotorRotor1Rotor2Rotor3Rotor4Rotor5Rotor6Rotor7Rotor8Sensor1Sensor2NoseLightLandingLightRedNavLightGreenNavLightBeaconLightStrobeLightPositionLight
Version History
Introduced in R2023a