Progettazione di controller PID con PID Tuner
In Control System Toolbox™, PID Tuner consente di eseguire la sincronizzazione automatica e interattiva dei controller PID per impianti rappresentati da modelli LTI.
Per informazioni sull'utilizzo di PID Tuner per la sincronizzazione di un blocco PID Controller in un modello di Simulink®, vedere Introduction to Model-Based PID Tuning in Simulink (Simulink Control Design).
Panoramica di PID Tuner
Utilizzare PID Tuner per progettare in modo interattivo un controller PID SISO in una configurazione di controllo a loop singolo con feedback negativo.
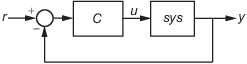
PID Tuner progetta automaticamente un controller per l'impianto. L’utente specifica il tipo di controller (P, I, PI, PD, PDF, PID, PIDF) e la forma (parallela o standard).
Si può inoltre utilizzare PID Tuner per progettare un controller PID 2-DOF per la configurazione del feedback della seguente illustrazione:
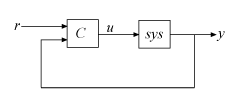
PID Tuner può progettare controller PID 2-DOF in cui i pesi del setpoint possono essere parametri liberi e sincronizzabili. PID Tuner può inoltre progettare controller in cui i pesi del setpoint sono fissi in configurazioni di controllo comuni, come I-PD e PI-D.
È possibile analizzare la progettazione utilizzando vari grafici di risposta e regolare in maniera interattiva la progettazione per soddisfare i propri requisiti di performance.
Per lanciare PID Tuner, utilizzare il comando pidTuner:
pidTuner(sys,type)
dove sys è il modello non lineare dell’impianto che si desidera controllare e type indica il tipo di controller da progettare.
In alternativa, immettere
pidTuner(sys,Cbase)
dove Cbase è un controller baseline, che consente di confrontare la performance del controller progettato con la performance di Cbase.
Per ulteriori informazioni su sys e Cbase, vedere la pagina dei riferimenti dipidTuner.
Nota
È inoltre possibile aprire PID Tuner dal desktop di MATLAB®, nella scheda Apps. A questo punto, utilizzare il menu Plant di PID Tuner per specificare il modello dell'impianto.
Tipo di controller PID
Per selezionare il tipo di controller, utilizzare uno dei seguenti metodi:
Specificare il tipo di controller all'apertura dell'app: fornire l'argomento
typeal comando dipidTunerquando si apre PID Tuner. Ad esempio,pidTuner(G,'PIDF2')apre PID Tuner con una progettazione iniziale di un controller PID 2-DOF con un filtro sul termine derivativo.Specificare il tipo di controller con un oggetto controller esistente: fornire l'argomento
Cbasedel controller baseline al comandopidTunerquando si apre PID Tuner. PID Tuner progetta un controller dello stesso tipo diCbase. Ad esempio, supponiamo cheC0sia un oggetto controllerpidsolo con azione proporzionale e derivativa (controller PD). In questo caso,pidTuner(G,C0)apre PID Tuner con una progettazione iniziale di un controller PD.Specificare il tipo di controller all'interno dell'app: in PID Tuner, utilizzare il menu Type per modificare i tipi di controller.

Le tabelle che seguono offrono un riepilogo dei tipi di controller PID disponibili. Per ulteriori informazioni su questi tipi di controller, vedere PID Controller Types for Tuning.
Controller 1-DOF
Immettere il type in pidTuner | Entrare nel menu Type | Azioni controller |
|---|---|---|
'P' | P | Solo proporzionale |
'I' | I | Solo integrale |
'PI' | PI | Proporzionale e integrale |
'PD' | PD | Proporzionale e derivativa |
'PDF' | PDF | Proporzionale e derivativa con filtro di ordine uno sul termine derivativo |
'PID' | PID | Proporzionale, integrale e derivativa |
'PIDF' | PIDF | Proporzionale, integrale e derivativa con filtro di ordine uno sul termine derivativo |
Controller 2-DOF
PID Tuner è in grado di progettare automaticamente tipi di controller PID 2-DOF con pesi dei setpoint liberi. La seguente tabella offre un riepilogo dei tipi di controller 2-DOF in PID Tuner. Per ulteriori informazioni sui controller PID 2-DOF in generale, vedere Two-Degree-of-Freedom PID Controllers.
Immettere il type in pidTuner | Entrare nel menu Type | Azioni controller |
|---|---|---|
'PI2' | PI2 | 2-DOF proporzionale e integrale |
'PD2' | PD2 | 2-DOF proporzionale e derivativa |
'PDF2' | PDF2 | 2-DOF proporzionale e derivativa con filtro di ordine uno sul termine derivativo |
'PID2' | PID2 | 2-DOF proporzionale, integrale e derivativa |
'PIDF2' | PIDF2 | 2-DOF proporzionale, integrale e derivativa con filtro di ordine uno sul termine derivativo |
Controller 2-DOF con pesi di setpoint fissi
Utilizzare PID Tuner per progettare i tipi di controller con peso del setpoint fisso riassunti nella seguente tabella. Per ulteriori informazioni su questi tipi di controller, vedere PID Controller Types for Tuning.
Immettere il type in pidTuner | Entrare nel menu Type | Azioni controller |
|---|---|---|
'I-PD' | I-PD | PID 2-DOF con b = 0, c = 0 |
'I-PDF' | I-PDF | PIDF 2-DOF con b = 0, c = 0 |
'ID-P' | ID-P | PID 2-DOF con b = 0, c = 1 |
'IDF-P' | IDF-P | PIDF 2-DOF con b = 0, c = 1 |
'PI-D' | PI-D | PID 2-DOF con b = 1, c = 0 |
'PI-DF' | PI-DF | PIDF 2-DOF con b = 1, c = 0 |
Tipi di controller a tempo discreto
Se sys è un modello a tempo discreto con tempo di campionamento Ts, PID Tuner progetta un controller pid a tempo discreto utilizzando la formula dell'integratore a tempo discreto ForwardEuler. Per progettare un controller dotato di diverse formule di integratore a tempo discreto, adottare uno dei seguenti metodi:
Fornire un controller baseline a tempo discreto
Cbaseal comando di lanciopidTuner. PID Tuner progetta quindi un controller che presenta le stesse formule di integrazione discreta diCbase.Dopo aver lanciato PID Tuner, fare clic su Options per aprire la finestra di dialogo Controller Options. Selezionare le formule di integratore a tempo discreto dai menu Integral Formula e Derivative Formula.
Per informazioni sulle formule di integratore a tempo discreto, vedere le pagine dei riferimenti dipid, pid2, pidstd e pidstd2.
Forma del controller PID
Quando si usa l'input type in pidTuner, PID Tuner progetta un controller a forma parallela. Per progettare un controller a forma standard, adottare uno dei seguenti metodi:
Fornire un controller baseline a forma standard
Cbaseal comando di lancio dipidTuner. PID Tuner progetta un controller con la stessa forma diCbase.Utilizzare il menu Form per modificare la forma del controller dopo aver lanciato PID Tuner.
Per informazioni sulla forma parallela e standard dei controller, vedere le pagine dei riferimenti di pid, pid2, pidstd e pidstd2.