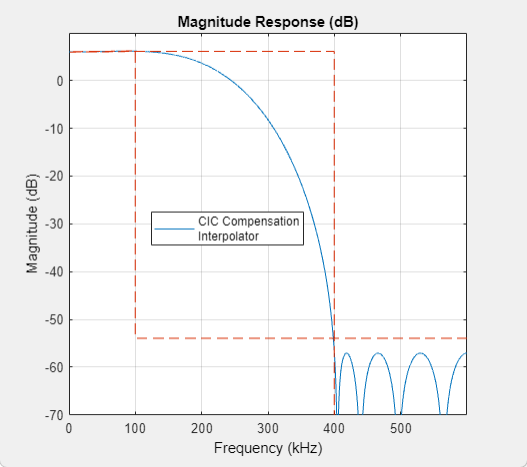
CIC Compensation Interpolator
Compensate for CIC filter using FIR interpolator
Libraries:
DSP System Toolbox /
Filtering /
Multirate Filters
Description
The CIC Compensation Interpolator block uses an FIR polyphase interpolator as the compensation filter. CIC compensation interpolators are multirate FIR filters that you cascade with CIC interpolators to mitigate the drawbacks of the CIC filters.
CIC interpolation filters are used in areas that require high interpolation. These filters are popular in ASICs and FPGAs, since they do not have any multipliers. CIC filters have two drawbacks:
CIC filters have a magnitude response that causes a droop in the passband region. This magnitude response is:
M — Differential delay
n — Number of stages
ω — Normalized angular frequency
CIC filters have a wide transition region.
The compensation interpolator filters have an inverse sinc passband response to correct for the CIC droop, and they have a narrow transition width.
This block brings the capabilities of the dsp.CICCompensationInterpolator
System object™ to the Simulink® environment.
Ports
Input
Output
Parameters
Main Tab
Specify the rate-change factor of the CIC filter as a positive integer. The block compensates the CIC filter using an FIR polyphase interpolator as the compensation filter.
Specify the number of sections in the CIC filter as a positive integer. The block compensates the CIC filter using an FIR polyphase interpolator as the compensation filter.
Specify the differential delay value used in each comb section of the CIC filter as a positive integer. The block compensates the CIC filter using an FIR polyphase interpolator as the compensation filter.
Specify the interpolation factor L of the compensation filter as a positive integer.
When you select this check box, the block designs filter with the minimum order that meets the passband frequency, stopband frequency, passband ripple, and stopband attenuation specifications. When you clear this check box, the block designs filter with the order that you specify in the Filter order parameter.
Specify the order of the compensator filter as a positive integer.
Dependencies
To enable this parameter, clear the Minimum order filter design parameter.
Specify the passband edge frequency Fpass of the compensation filter as a positive scalar in Hz or in normalized frequency units (since R2024a).
If you set the Sample rate mode parameter to:
Specify on dialogorInherit from input port— The value of the passband edge frequency is in Hz and must be in the range Fpass < Fstop < (Fs/2) × L, where Fstop is the stopband edge frequency, Fs is the input sample rate that you specify through the Input sample rate (Hz) parameter, and L is the interpolation factor that you specify through the Interpolation factor parameter.Use normalized frequency (0 to 1)— The value of the passband edge frequency is in normalized frequency units and must be in the range Fpass < Fstop <1.0.
(since R2024a)
Specify the stopband edge frequency Fstop of the compensation filter as a positive scalar in Hz or in normalized frequency units (since R2024a).
If you set the Sample rate mode parameter to:
Specify on dialogorInherit from input port— The value of the stopband edge frequency is in Hz and must be in the range Fpass < Fstop < (Fs/2) × L, where Fpass is the passband edge frequency, Fs is the input sample rate that you specify through the Input sample rate (Hz) parameter, and L is the interpolation factor that you specify through the Interpolation factor parameter.Use normalized frequency (0 to 1)— The value of the stopband edge frequency is in normalized frequency units and must be in the range Fpass < Fstop <1.0.
(since R2024a)
Dependency
To enable this parameter, select the Minimum order filter design parameter.
Specify the filter passband ripple of the compensation filter as a positive scalar in dB.
Specify the stopband attenuation of the compensation filter as a positive scalar in dB.
Since R2024a
Specify the input sample rate using one of these options:
Use normalized frequency (0 to 1)— Specify the passband edge and the stopband edge frequencies in normalized frequency units (0 to 1).Specify on dialog— Specify the input sample rate in the block dialog box using the Input sample rate (Hz) parameter.Inherit from input port— The block inherits the sample rate from the input signal.
Specify the sample rate of input signal as a positive scalar in Hz.
Dependencies
To enable this parameter,
set the Sample rate mode parameter to
Specify on dialog. (since R2024a)
Click this button to open the Filter Visualization Tool (FVTool) and display the magnitude and phase response of the CIC Compensation Interpolator. The response is based on the values you specify in the block parameters dialog box. Changes made to these parameters update FVTool.
To update the magnitude response while FVTool is running, modify the dialog box parameters and click Apply.
To view the magnitude response and phase response simultaneously, click the Magnitude and Phase responses button on the toolbar.

Specify the type of simulation to run. You can set this parameter to:
Interpreted execution— Simulate model using the MATLAB® interpreter. This option shortens startup time.Code generation— Simulate model using generated C code. The first time you run a simulation, Simulink generates C code for the block. The C code is reused for subsequent simulations as long as the model does not change. This option requires additional startup time but provides faster subsequent simulations.
Data Types Tab
Select the rounding
mode for fixed-point operations. The default is
Floor.
Specify the fixed-point data type of the coefficients as one of the following:
fixdt(1,16)— Signed fixed-point data type of word length16with binary point scaling. The block determines the fraction length automatically from the coefficient values in such a way that the coefficients occupy maximum representable range without overflowing.fixdt(1,16,0)— Signed fixed-point data type of word length16with fraction length0. You can change the fraction length to any other integer value.<data type expression>— Specify the coefficients data type by using an expression that evaluates to a data type object. For example,numerictype(fixdt([ ],16,15)). Specify the sign mode of this data type as[ ]or true.Refresh Data Type— Refresh to the default data type.
Click the Show data type assistant
button ![]() to display the data type assistant,
which helps you set the coefficients data type.
to display the data type assistant,
which helps you set the coefficients data type.
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Algorithms
The response of a CIC filter is given by:
R, D, and N are the rate change factor, the differential delay, and the number of sections in the CIC filter, respectively.
After decimation, the CIC response has the form:
The normalized version of this last response is the one that the CIC compensator needs to compensate. Hence, the passband response of the CIC compensator should take the following form:
where ωp is the passband frequency of the CIC compensation filter.
Notice that when ω/2R ≪ π, the previous equation for Hciccomp(ω) can be simplified using the fact that sin(x) ≅ x:
This previous equation is the inverse sinc approximation to the true inverse passband response of the CIC filter.