magparams
Magnetometer sensor parameters
Description
The magparams class creates a magnetometer sensor parameters
object. You can use this object to model a magnetometer when simulating an IMU with
imuSensor. See the
Algorithms section of imuSensor for details
of magparams modeling.
Creation
Description
params = magarams
params = magparams(Name,Value)magparams object properties using
one or more Name,Value pair arguments.
Name is a property name and Value is
the corresponding value. Name must appear inside single
quotes (''). You can specify several name-value pair
arguments in any order as Name1,Value1,...,NameN,ValueN. Any
unspecified properties take default values.
Properties
Examples
Generate magnetometer data for an imuSensor object from stationary inputs.
Generate a magnetometer parameter object with a maximum sensor reading of 1200 and a resolution of 0.1 . The constant offset bias is 1 . The sensor has a power spectral density of . The bias from temperature is [0.8 0.8 2.4] . The scale factor error from temperature is 0.1 %.
params = magparams('MeasurementRange',1200,'Resolution',0.1, ... 'ConstantBias',1,'NoiseDensity',[0.6 0.6 0.9]/sqrt(100), ... 'TemperatureBias',[0.8 0.8 2.4],'TemperatureScaleFactor',0.1);
Use a sample rate of 100 Hz spaced out over 1000 samples. Create the imuSensor object using the magnetometer parameter object.
Fs = 100; numSamples = 1000; t = 0:1/Fs:(numSamples-1)/Fs; imu = imuSensor('accel-mag','SampleRate', Fs, 'Magnetometer', params);
Generate magnetometer data from the imuSensor object.
orient = quaternion.ones(numSamples, 1); acc = zeros(numSamples, 3); angvel = zeros(numSamples, 3); [~, magData] = imu(acc, angvel, orient);
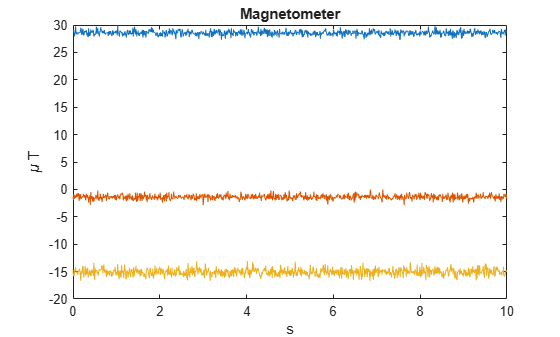
Plot the resultant magnetometer data.
plot(t, magData) title('Magnetometer') xlabel('s') ylabel('\mu T')