targetMeshes
Syntax
Description
tgtMeshes = targetMeshes(plat,reportSelf)plat. Specify reportSelf as
true or false.
tgtMeshes = targetMeshes(plat,reportSelf,format)format of orientation as quaternion or
rotation matrix in the tgtMeshes output.
Examples
Obtain Mesh of Target
Create a tracking scenario. Create an ego platform and a target platform.
scenario = trackingScenario; ego = platform(scenario,'Position',[1 1 1]); target = platform(scenario,'Trajectory',kinematicTrajectory('Position',[10 -3 0],'Velocity',[5 0 0]));
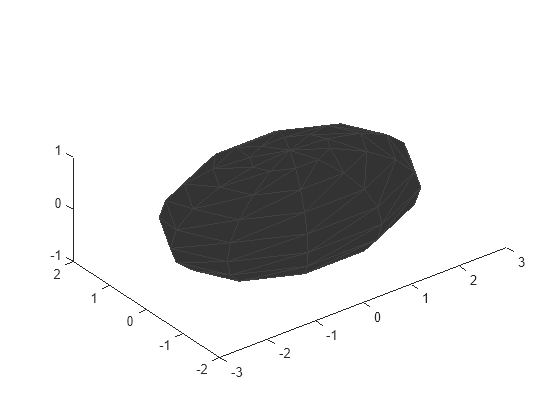
Define the target's mesh and adjust its dimensions.
target.Mesh = extendedObjectMesh('sphere');
target.Dimensions.Length = 5;
target.Dimensions.Width = 3;
target.Dimensions.Height = 2;Get the mesh of the target viewed from the ego platform.
tgtmeshes = targetMeshes(ego);
Show the derived mesh of the target from the view of the ego platform.
show(tgtmeshes.Mesh);
Input Arguments
Output Arguments
Version History
Introduced in R2020b
See Also
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)