Estimate Phone Orientation Using Sensor Fusion
MATLAB® Mobile™ reports sensor data from the accelerometer, gyroscope, and magnetometer on Apple or Android® mobile devices. Raw data from each sensor or fused orientation data can be obtained. This example shows how to compare the fused orientation data from the phone with the orientation estimate from the ahrsfilter (Navigation Toolbox) object.
Read the Accelerometer, Gyroscope, Magnetometer, and Euler Angles
Read the logged phone sensor data. The MAT file samplePhoneData.mat contains sensor data logged on an iPhone at a 100 Hz sampling rate. To run this example with your own phone data, refer to Sensor Data Collection with MATLAB Mobile.
matfile = 'samplePhoneData.mat'; SampleRate = 100; % This must match the data rate of the phone. [Accelerometer, Gyroscope, Magnetometer, EulerAngles] ... = exampleHelperProcessPhoneData(matfile);
Convert to North-East-Down (NED) Coordinate Frame
MATLAB Mobile uses the convention shown in the following image. To process the sensor data with the ahrsfilter object, convert to NED, a right-handed coordinate system. In the NED frame, a positive rotation angle corresponds to a clockwise rotation about an axis when viewing from the origin along the positive direction of the axis. The right-hand convention is equivalent, where positive rotation is indicated by the direction in which the fingers on your right hand curl when your thumb is pointing in the direction of the axis of rotation. Swap the x- and y-axis and negate the z-axis for the various sensor data. Note that the accelerometer readings are negated since the readings have the opposite sign in the two conventions.
Accelerometer = -[Accelerometer(:,2), Accelerometer(:,1), -Accelerometer(:,3)]; Gyroscope = [Gyroscope(:,2), Gyroscope(:,1), -Gyroscope(:,3)]; Magnetometer = [Magnetometer(:,2), Magnetometer(:,1), -Magnetometer(:,3)]; qTrue = quaternion([EulerAngles(:,3), -EulerAngles(:,2), EulerAngles(:,1)], ... 'eulerd', 'ZYX', 'frame');
Correct Phone Initial Rotation
The phone may have a random rotational offset. Without knowing the offset, you cannot compare the ahrsfilter object and the phone results. Use the first four samples to determine the rotational offset, then rotate the phone data back to desirable values.
% Get a starting guess at orientation using ecompass. No coefficients % required. Use the initial orientation estimates to figure out what the % phone's rotational offset is. q = ecompass(Accelerometer, Magnetometer); Navg = 4; qfix = meanrot(q(1:Navg))./meanrot(qTrue(1:Navg)); Orientation = qfix*qTrue; % Rotationally corrected phone data.
Tune the AHRS Filter
To optimize the noise parameters for the phone, tune the ahrsfilter object. The parameters on the filter need to be tuned for the specific IMU on the phone that logged the data in the MAT file. Use the tune (Navigation Toolbox) function with the logged orientation data as ground truth.
orientFilt = ahrsfilter('SampleRate', SampleRate); groundTruth = table(Orientation); sensorData = table(Accelerometer, Gyroscope, Magnetometer); tc = tunerconfig('ahrsfilter', "MaxIterations", 30, ... 'ObjectiveLimit', 0.001, 'Display', 'none'); tune(orientFilt, sensorData, groundTruth, tc);
Fuse Sensor Data with Filter
Estimate the device orientation using the tuned ahrsfilter object.
reset(orientFilt); qEst = orientFilt(Accelerometer,Gyroscope,Magnetometer);
Plot Results
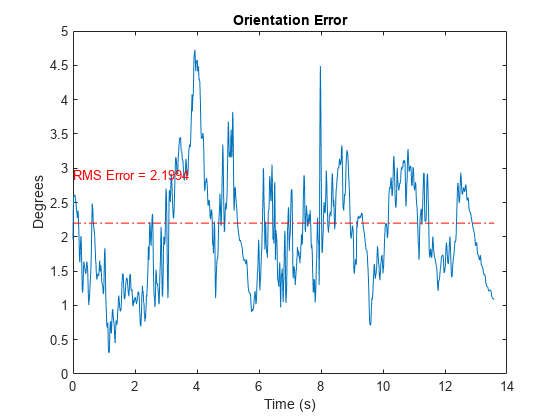
Plot the Euler angles for each orientation estimate and the quaternion distance between the two orientation estimates. Quaternion distance is measured as the angle between two quaternions. This distance can be used as an error metric for orientation estimation.
numSamples = numel(Orientation); t = (0:numSamples-1).'/SampleRate; d = rad2deg(dist(qEst, Orientation)); figure plot(t, eulerd(qEst, 'ZYX', 'frame')) legend yaw pitch roll title('ahrsfilter Euler Angles') ylabel('Degrees') xlabel('Time (s)')
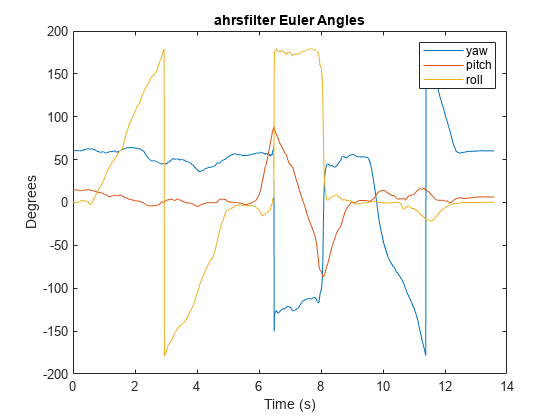
figure plot(eulerd(Orientation, 'ZYX', 'frame')) legend yaw pitch roll title('Phone Euler Angles') ylabel('Degrees') xlabel('Time (s)')
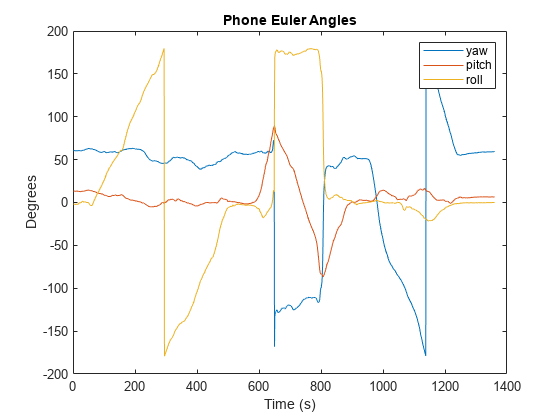
figure plot(t, d) title('Orientation Error') ylabel('Degrees') xlabel('Time (s)') % Add RMS error rmsval = sqrt(mean(d.^2)); line(t, repmat(rmsval,size(t)),'LineStyle','-.','Color','red'); text(t(1),rmsval + 0.7,"RMS Error = " + rmsval,'Color','red')
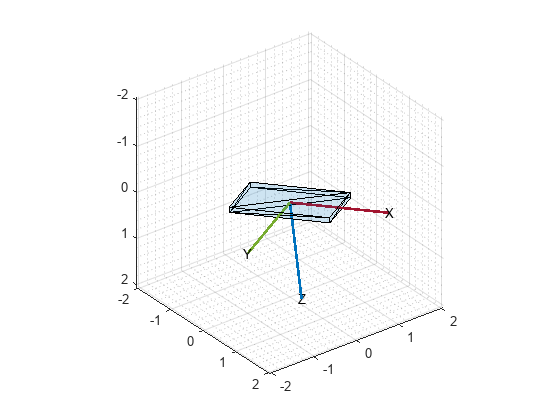
Use poseplot to view the orientation estimates of the phone as a 3-D rectangle.
figure pp = poseplot("MeshFileName", "phoneMesh.stl"); for i = 1:numel(qEst) set(pp, "Orientation", qEst(i)); drawnow end