Stereo Disparity
This example shows how to generate a CUDA® MEX function from a MATLAB® function that computes the stereo disparity of two images.
Third-Party Prerequisites
Required
This example generates CUDA MEX and has the following third-party requirements.
CUDA enabled NVIDIA® GPU and compatible driver. For half-precision code generation, the GPU device must have a minimum compute capability of 6.0.
Optional
For non-MEX builds such as static, dynamic libraries or executables, this example has the following additional requirements.
NVIDIA toolkit.
Environment variables for the compilers and libraries. For more information, see Third-Party Hardware and Setting Up the Prerequisite Products.
Verify GPU Environment
To verify that the compilers and libraries necessary for running this example are set up correctly, use the coder.checkGpuInstall function.
envCfg = coder.gpuEnvConfig('host');
envCfg.BasicCodegen = 1;
envCfg.Quiet = 1;
coder.checkGpuInstall(envCfg);Stereo Disparity Calculation
The stereoDisparity.m entry-point function takes two images and returns a stereo disparity map computed from the two images.
type stereoDisparity%% Modified Algorithm for Stereo Disparity Block Matching
% In this implementation, instead of finding shifted image, indices are
% mapped accordingly to save memory and some processing. RGBA column major
% packed data is used as input for compatibility with CUDA intrinsics.
% Convolution is performed using separable filters (horizontal and then
% vertical).
% Copyright 2017-2021 The MathWorks, Inc.
function [out_disp] = stereoDisparity(img0,img1) %#codegen
% Copyright 2017-2019 The MathWorks, Inc.
% GPU code generation pragma
coder.gpu.kernelfun;
%% Stereo Disparity Parameters
% |WIN_RAD| is the radius of the window to be operated. |min_disparity| is
% the minimum disparity level the search continues for. |max_disparity| is
% the maximum disparity level the search continues for.
WIN_RAD = 8;
min_disparity = -16;
max_disparity = 0;
%% Image Dimensions for Loop Control
% The number of channels packed are 4 (RGBA) so as nChannels are 4.
[imgHeight,imgWidth]=size(img0);
nChannels = 4;
imgHeight = imgHeight/nChannels;
%% Store the Raw Differences
diff_img = zeros([imgHeight+2*WIN_RAD,imgWidth+2*WIN_RAD],'int32');
% Store the minimum cost
min_cost = zeros([imgHeight,imgWidth],'int32');
min_cost(:,:) = 99999999;
% Store the final disparity
out_disp = zeros([imgHeight,imgWidth],'int16');
%% Filters for Aggregating the Differences
% |filter_h| is the horizontal filter used in separable convolution.
% |filter_v| is the vertical filter used in separable convolution which
% operates on the output of the row convolution.
filt_h = ones([1 17],'int32');
filt_v = ones([17 1],'int32');
% Main Loop that runs for all the disparity levels. This loop is
% expected to run on CPU.
for d=min_disparity:max_disparity
% Find the difference matrix for the current disparity level. Expect
% this to generate a Kernel function.
coder.gpu.kernel;
for colIdx=1:imgWidth+2*WIN_RAD
coder.gpu.kernel;
for rowIdx=1:imgHeight+2*WIN_RAD
% Row index calculation.
ind_h = rowIdx - WIN_RAD;
% Column indices calculation for left image.
ind_w1 = colIdx - WIN_RAD;
% Row indices calculation for right image.
ind_w2 = colIdx + d - WIN_RAD;
% Border clamping for row Indices.
if ind_h <= 0
ind_h = 1;
end
if ind_h > imgHeight
ind_h = imgHeight;
end
% Border clamping for column indices for left image.
if ind_w1 <= 0
ind_w1 = 1;
end
if ind_w1 > imgWidth
ind_w1 = imgWidth;
end
% Border clamping for column indices for right image.
if ind_w2 <= 0
ind_w2 = 1;
end
if ind_w2 > imgWidth
ind_w2 = imgWidth;
end
% In this step, Sum of absolute Differences is performed
% across tour channels.
tDiff = int32(0);
for chIdx = 1:nChannels
tDiff = tDiff + abs(int32(img0((ind_h-1)*(nChannels)+...
chIdx,ind_w1))-int32(img1((ind_h-1)*(nChannels)+...
chIdx,ind_w2)));
end
% Store the SAD cost into a matrix.
diff_img(rowIdx,colIdx) = tDiff;
end
end
% Aggregating the differences using separable convolution. Expect this
% to generate two kernels using shared memory.The first kernel is the
% convolution with the horizontal kernel and second kernel operates on
% its output the column wise convolution.
cost_v = conv2(diff_img,filt_h,'valid');
cost = conv2(cost_v,filt_v,'valid');
% This part updates the min_cost matrix with by comparing the values
% with current disparity level.
for ll=1:imgWidth
for kk=1:imgHeight
% load the cost
temp_cost = int32(cost(kk,ll));
% Compare against the minimum cost available and store the
% disparity value.
if min_cost(kk,ll) > temp_cost
min_cost(kk,ll) = temp_cost;
out_disp(kk,ll) = abs(d) + 8;
end
end
end
end
end
Read Images and Pack Data Into RGBA Packed Column-Major Order
img0 = imread('scene_left.png'); img1 = imread('scene_right.png'); [imgRGB0] = pack_rgbData(img0); [imgRGB1] = pack_rgbData(img1);
Left Image

Right Image

Generate GPU Code
cfg = coder.gpuConfig('mex'); codegen -config cfg -args {imgRGB0, imgRGB1} stereoDisparity;
Code generation successful: View report
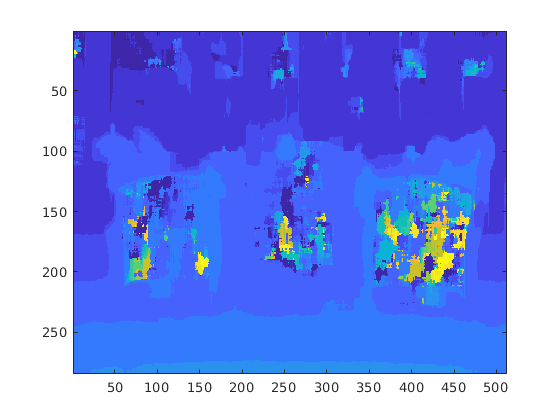
Run Generated MEX and Show the Output Disparity
out_disp = stereoDisparity_mex(imgRGB0,imgRGB1); imagesc(out_disp);
Half Precision
Computations in this example can also be done in half-precision floating point numbers, using the stereoDisparityHalfPrecision.m entry-point function. To generate and execute code with half-precision data types, CUDA compute capability of 6.0 or higher is required. Set the ComputeCapability property of the code configuration object to '6.0'. For half-precision, the memory allocation (malloc) mode for generating CUDA code must be set to 'Discrete'.
cfg.GpuConfig.ComputeCapability = '6.0'; cfg.GpuConfig.MallocMode = 'Discrete';
The standard imread command represents the RGB channels of an images with integers, one for each pixel. The integers range from 0 to 255. Simply casting inputs to half type might result in overflow during convolutions. In this case, we can scale the images to values between 0 and 1. "imread" represents the RGB channels of an images with integers, one for each pixel. The integers range from 0 to 255. Simply casting inputs to half type might result in overflow during convolutions. In this case, we can scale the images to values between 0 and 1.
img0 = imread('scene_left.png'); img1 = imread('scene_right.png'); [imgRGB0] = half(pack_rgbData(img0))/255; [imgRGB1] = half(pack_rgbData(img1))/255;
Generate CUDA MEX for the Function
Code generation on the stereo_disparity_half_precision.m function.
codegen -config cfg -args {imgRGB0, imgRGB1} stereoDisparityHalfPrecision;
Code generation successful: View report
See Also
Functions
codegen|coder.gpu.kernel|coder.gpu.kernelfun|gpucoder.matrixMatrixKernel|coder.gpu.constantMemory|stencilfun|coder.checkGpuInstall
Objects
Topics
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)