Modelli grey-box lineari
Se si conosce la fisica del sistema e si è in grado di rappresentarlo utilizzando equazioni ordinarie differenziali o di differenza (ODE) con parametri non noti, è possibile utilizzare i comandi System Identification Toolbox™ per eseguire la modellazione grey-box. Le ODE del modello grey-box specificano esplicitamente la struttura matematica del modello, compresi gli accoppiamenti tra i parametri. La modellazione grey-box è utile quando le relazioni tra le variabili, i vincoli sul comportamento del modello o le equazioni esplicite che rappresentano la dinamica del sistema sono note.
È possibile rappresentare un modello lineare grey-box utilizzando un oggetto idgrey, che richiede la scrittura di una funzione per descrivere la dinamica lineare nella forma stato-spazio. Per ulteriori informazioni, vedere Estimate Linear Grey-Box Models.
Funzioni
Argomenti
- Linear and Nonlinear Grey-Box Modeling
If you understand the physics of your system, you can estimate linear or nonlinear grey-box models.
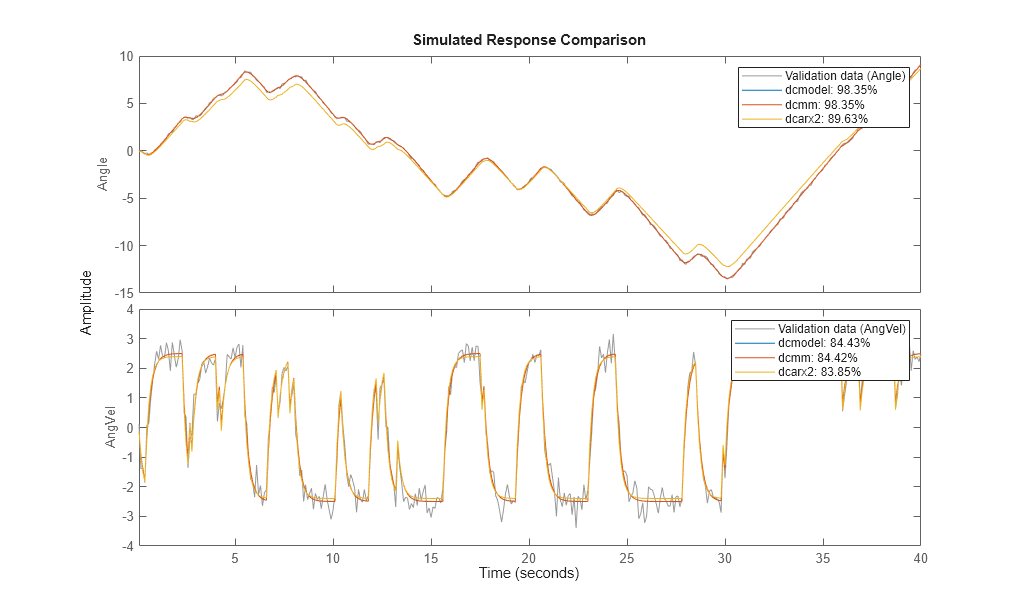
- Identifying State-Space Models with Separate Process and Measurement Noise Descriptions
An identified linear model is used to simulate and predict system outputs for given input and noise signals.
- Estimate Linear Grey-Box Models
How to define and estimate linear grey-box models at the command line.
- Estimate Continuous-Time Grey-Box Model for Heat Diffusion
This example shows how to estimate the heat conductivity and the heat-transfer coefficient of a continuous-time grey-box model for a heated-rod system.
- Estimate Discrete-Time Grey-Box Model with Parameterized Disturbance
This example shows how to create a single-input and single-output grey-box model structure when you know the variance of the measurement noise.
- Estimate State-Space Models with Structured Parameterization
Structured parameterization lets you exclude specific parameters from estimation by setting these parameters to specific values.
- Estimate Coefficients of ODEs to Fit Given Solution
Estimate model parameters using linear and nonlinear grey-box modeling.
- Estimate Model Using Zero/Pole/Gain Parameters
This example shows how to estimate a model that is parameterized by poles, zeros, and gains.
Esempi in primo piano
Building Structured and User-Defined Models Using System Identification Toolbox
Estimate parameters in user-defined model structures.