arx
Estimate parameters of ARX, ARIX, AR, or ARI model
Syntax
Description
Estimate AR or ARX Model
sys = arx(tt,[na nb nk])idpoly model sys using the data contained in the
variables of timetable tt. The software uses the first
Nu variables as inputs and the next Ny variables
as outputs, where Nu and Ny are determined from the
dimensions of nb and na, respectively.
For AR models, which have no input signals, use sys = arx(tt,na).
In this case, the software fits the model using the first Ny
variables.
arx performs the estimation using a least-squares method and the
polynomial orders specified in [na nb nk]. The model properties
include covariances (parameter uncertainties) and goodness of fit between the estimated
and measured data.
To select specific input and output channels from tt, use
name-value syntax to set 'InputName' and
'OutputName' to the corresponding timetable variable names.
sys = arx(u,y,[na nb nk])u,y. The software assumes that the data sample
time is 1 second. To change the sample time, set Ts using name-value
syntax.
sys = arx(data,[na nb nk])data. Use this syntax especially when you want to estimate a model
using frequency-domain or frequency-response data, or when you want to take advantage of
the additional information, such as data sample time or experiment labeling, that data
objects provide.
Specify Additional Options
sys = arx(___,Name,Value)'IntegrateNoise',1 estimates an
ARIX or ARI structure
model, which is useful for systems with nonstationary disturbances. You can use this
syntax with any of the previous input-argument combinations.
Return Estimated Initial Conditions
[
returns the estimated initial conditions as an sys,ic] = arx(___)initialCondition
object. Use this syntax if you plan to simulate or predict the model response using the
same estimation input data and then compare the response with the same estimation output
data. Incorporating the initial conditions yields a better match during the first part of
the simulation.
Examples
Generate output data based on a specified ARX model and use the output data to estimate the model.
Specify a polynomial model sys0 with the ARX structure. The model includes an input delay of one sample, expressed as a leading zero in the B polynomial.
A = [1 -1.5 0.7]; B = [0 1 0.5]; sys0 = idpoly(A,B);
Generate a measured input signal u that contains random binary noise and an error signal e that contains normally distributed noise. With these signals, simulate the measured output signal y of sys0.
u = iddata([],idinput(300,'rbs'));
e = iddata([],randn(300,1));
y = sim(sys0,[u e]);Combine y and u into a single iddata object z. Estimate a new ARX model using z and the same polynomial orders and input delay as the original model.
z = [y,u]; sys = arx(z,[2 2 1])
sys =
Discrete-time ARX model: A(z)y(t) = B(z)u(t) + e(t)
A(z) = 1 - 1.524 z^-1 + 0.7134 z^-2
B(z) = z^-1 + 0.4748 z^-2
Sample time: 1 seconds
Parameterization:
Polynomial orders: na=2 nb=2 nk=1
Number of free coefficients: 4
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using ARX on time domain data "sys0".
Fit to estimation data: 81.36% (prediction focus)
FPE: 1.025, MSE: 0.9846
Model Properties
The output displays the polynomial containing the estimated parameters alongside other estimation details. Under Status, Fit to estimation data shows that the estimated model has 1-step-ahead prediction accuracy above 80%.
Estimate a time-series AR model using the arx function. An AR model has no measured input.
Load the data, which is in a timetable that contains the time series tt9 with noise.
load sdata9 tt9
Estimate a fourth-order AR model by specifying only the na order in [na nb nk].
sys = arx(tt9,4);
Examine the estimated A polynomial parameters and the fit of the estimate to the data.
param = sys.Report.Parameters.ParVector
param = 4×1
-0.7923
-0.4780
-0.0921
0.4698
fit = sys.Report.Fit.FitPercent
fit = 79.4835
Estimate the parameters of an ARIX model. An ARIX model is an ARX model with integrated noise.
Specify a polynomial model sys0 with an ARX structure. The model includes an input delay of one sample, expressed as a leading zero in B.
A = [1 -1.5 0.7]; B = [0 1 0.5]; sys0 = idpoly(A,B);
Simulate the output signal of sys0 using the random binary input signal u and the normally distributed error signal e.
u = iddata([],idinput(300,'rbs'));
e = iddata([],randn(300,1));
y = sim(sys0,[u e]);Integrate the output signal and store the result yi in the iddata object zi.
yi = iddata(cumsum(y.y),[]); zi = [yi,u];
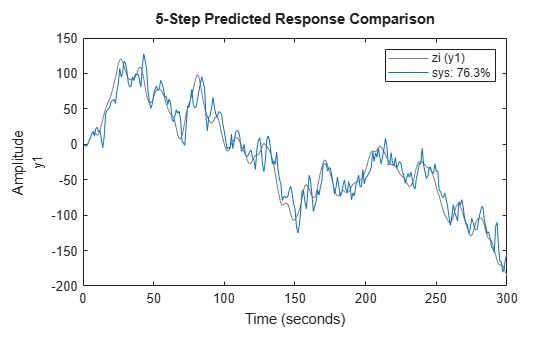
Estimate an ARIX model from zi. Set the name-value pair argument 'IntegrateNoise' to true.
sys = arx(zi,[2 2 1],'IntegrateNoise',true);Predict the model output using 5-step prediction and compare the result with yi.
compare(zi,sys,5)
Use arxRegul to determine regularization constants automatically and use the values for estimating an FIR model with an order of 50.
Obtain the lambda and R values.
load regularizationExampleData eData; orders = [0 50 0]; [lambda,R] = arxRegul(eData,orders);
Use the returned lambda and R values for regularized ARX model estimation.
opt = arxOptions; opt.Regularization.Lambda = lambda; opt.Regularization.R = R; sys = arx(eData,orders,opt);
Load the data.
load iddata1ic z1i
Estimate a second-order ARX model sys and return the initial conditions in ic.
na = 2; nb = 2; nk = 1; [sys,ic] = arx(z1i,[na nb nk]); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0 2]
Ts: 0.1000
ic is an initialCondition object that encapsulates the free response of sys, in state-space form, to the initial state vector in X0. You can incorporate ic when you simulate sys with the z1i input signal and compare the response with the z1i output signal.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Algorithms
QR factorization solves the overdetermined set of linear equations that constitutes the least-squares estimation problem.
Without regularization, the ARX model parameters vector θ is estimated by solving the normal equation
where J is the regressor matrix and y is the measured output. Therefore,
Using regularization adds the regularization term
where λ and R are the regularization constants. For more information on the regularization
constants, see arxOptions.
When the regression matrix is larger than the MaxSize specified in
arxOptions, the data is segmented and QR factorization is performed iteratively
on the data segments.