era
Estimate state-space model from impulse response data using Eigensystem Realization Algorithm (ERA)
Since R2022b
Description
era uses the
Eigensystem
Realization Algorithm [1] to estimate a state-space
model using impulse response data rather than input/output data. era is
especially useful for identifying dynamic systems for applications such as modal analysis or
structural health modeling. You can also use era for modeling time-series
data for applications such as prediction. For more information about the algorithm, see [1].
sys = era(data)data, which can be either a timetable or matrix that contains only
output data. The software determines the order of the model nx
automatically.
sys is a model of the following form:
A, B, C, D,
and K are state-space matrices.
u(t) is the input,
y(t) is the output,
e(t) is the disturbance, and
x(t) is the vector of nx
states.
All entries of A, B, C, and
K are free estimable parameters by default. D is
fixed to zero by default, meaning that there is no feedthrough, except for static systems
(nx = 0).
The software sets the sample time of sys to the sample time of
data if data is a timetable, or to -1 if
data is a matrix.
sys = era(data,nx,Name=Value)Feedthrough name-value argument to introduce feedthrough by
estimating the D matrix. Use the InputDelay
name-value argument to specify input delays for each channel.
Examples
Load and plot the data Htt, which is a timetable that contains impulse response data in the variable H.
load impulseresponse.mat Htt plot(Htt.Time,Htt.H) title('Impulse Response')
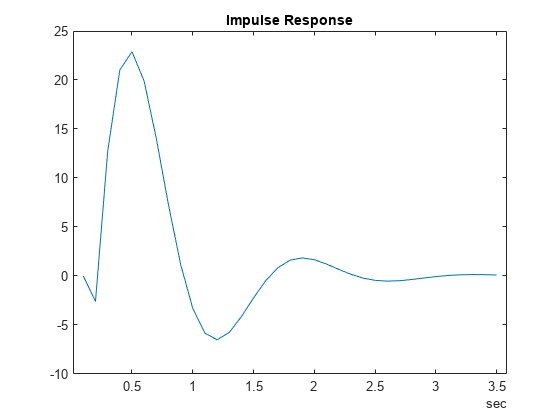
Use era to estimate a state-space model.
sys = era(Htt); sysorder = order(sys)
sysorder = 2
sys is an idss model of order 2.
Load and plot the data H, which is a numeric matrix. Ts is the sample time for the data in H.
load impulseresponse.mat H Ts L = size(H,1); t = (1:L)'*Ts; plot(t,H) title('Impulse Response')
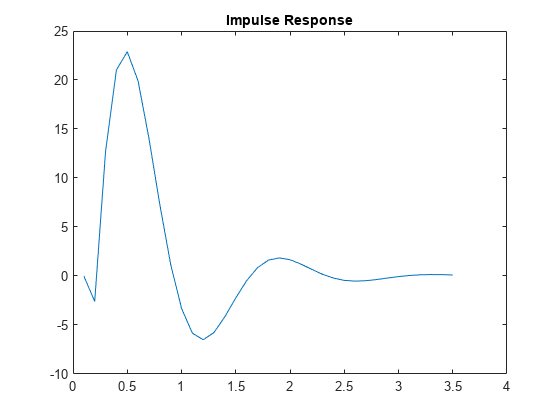
Use era to estimate a state-space model of order 3.
sys = era(H,3); sysorder = order(sys)
sysorder = 3
sys is an idss model of order 3.
Load the impulse response data, which is in the form of a timetable.
load impulseresponse.mat Htt
Use era to specify a state-space model that includes feedthrough.
sys = era(Htt,'best',Feedthrough=1);Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Juang, Jer-Nan, and Richard S. Pappa. “An Eigensystem Realization Algorithm for Modal Parameter Identification and Model Reduction.” Journal of Guidance, Control, and Dynamics 8, no. 5 (September 1985): 620–27. https://doi.org/10.2514/3.20031.
Version History
Introduced in R2022b