imfindcirclesYOLO
Syntax
Description
Add-On Required: This feature requires the Image Processing Toolbox Model for Circle Detection add-on.
centers = imfindcirclesYOLO(img,Name=Value)Method="yolox-small" to find circles using the pretrained YOLOX-Small
model.
Examples
Read an image into the workspace.
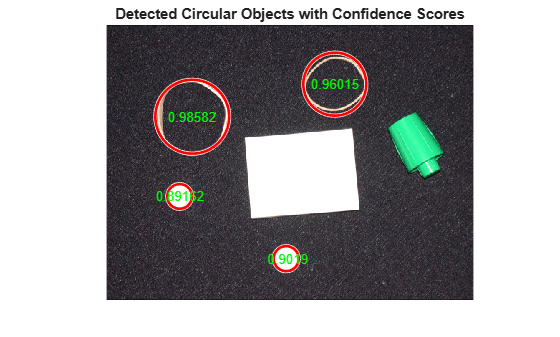
img = imread("pillsetc.png");Detect circular objects in the image using the imfindcirclesYOLO function.
[centers,radii,scores] = imfindcirclesYOLO(img);
Display the input image, then draw circle annotations over the detected circular objects by using the viscircles function. Display a label for each circle with its confidence score.
imshow(img) hold on viscircles(centers,radii); text(centers(:,1),centers(:,2),num2str(scores),Color="g", ... HorizontalAlignment="center",VerticalAlignment="middle") hold off title("Detected Circular Objects with Confidence Scores")
Load a MAT file containing an image sequence into the workspace.
load("cellsequence.mat");
I = cellsequence;Check the size of the input array. The array has three dimensions, which indicates that image sequence consists of grayscale images. The array has size m-by-n-by-p, which indicates that the sequence consists of p images of size m-by-n.
size(I)
ans = 1×3
480 640 10
For grayscale image sequences, the imfindcirclesYOLO function requires the input array to have four dimensions with size m-by-n-by-1-by-p, where the third dimension (channels) is explicitly set to 1. Reshape the input array to add a singleton third dimension.
[m,n,p] = size(I); seqGray = reshape(I,[m n 1 p]);
Detect circular objects within each image of the grayscale image sequence by using the imfindcirclesYOLO function, specifying the YOLOX-Small model. Set the radii of the circular objects to lie in the range [10, 50]. Set the minimum confidence score to 0.85.
[centers,radii] = imfindcirclesYOLO(seqGray,Method="yolox-small", ... RadiusRange=[10 50],ConfidenceThreshold=0.85);
Annotate each image with the detection results. Annotated images must be in RGB format so that colored overlays are visible. To convert the image sequence from grayscale to RGB, replicate the sequence three times in the third (channel) dimension.
seqRGB = cat(3,seqGray,seqGray,seqGray);
For each image in the sequence, perform these operations to add the annotation to the RGB image.
Extract the center coordinates and radii of detected objects in the current RGB image.
Create a binary mask of circles by using the
circles2maskfunction with the center coordinates and radii.Find the perimeter of circles in the binary mask by using the
bwperimfunction with a connectivity of8.Increase the linewidth of the circle perimeters by using the
imdilatefunction with a disk-shaped structuring element.Overlay the perimeter of circles on the current RGB image by using the
imoverlayfunction.Replace the current image in the RGB image sequence with the annotated RGB image.
for idx = 1:p centersP = centers{idx}; radiiP = radii{idx}; imRGB = seqRGB(:,:,:,idx); mask = circles2mask(centersP,radiiP,[m n]); maskEdge = bwperim(mask,8); maskEdge = imdilate(maskEdge,strel("disk",1)); imAnnotated = imoverlay(imRGB,maskEdge,"g"); seqRGB(:,:,:,idx) = imAnnotated; end
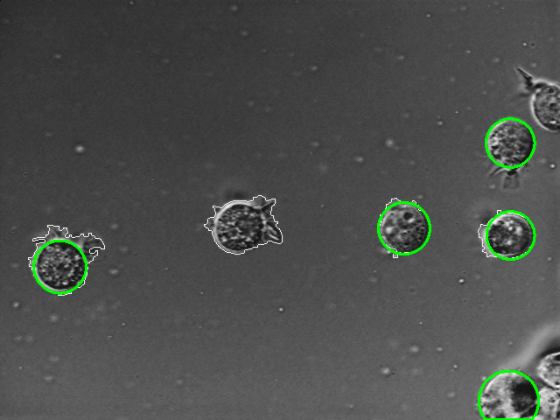
Display the first image with circle annotations.
imageshow(seqRGB(:,:,:,1))
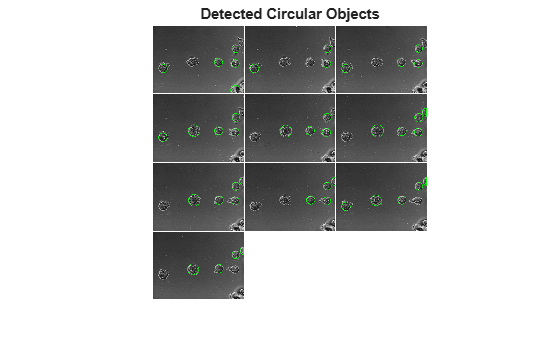
Display a montage of all images in the image sequence with the circle annotations.
montage(seqRGB,BorderSize=2,BackgroundColor="w") title("Detected Circular Objects")
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
The pretrained YOLOX networks are trained on a curated subset of images from the Landscapes HQ data set [2].
References
[1] Ge, Zheng, Songtao Liu, Feng Wang, Zeming Li, and Jian Sun. “YOLOX: Exceeding YOLO Series in 2021.” arXiv, August 5, 2021. https://arxiv.org/abs/2107.08430.
[2] Skorokhodov, Ivan, Grigorii Sotnikov, and Mohamed Elhoseiny. “Aligning Latent and Image Spaces to Connect the Unconnectable.” arXiv:2104.06954. Preprint, arXiv, April 14, 2021. https://doi.org/10.48550/arXiv.2104.06954.
Version History
Introduced in R2026a