ode45
Risolvere equazioni differenziali non rigide - metodo di ordine medio
Sintassi
Descrizione
[, dove t,y] = ode45(odefun,tspan,y0)tspan = [t0 tf] integra il sistema di equazioni differenziali da t0 a tf con condizioni iniziali y0. Ciascuna riga dell'array della soluzione y corrisponde a un valore restituito nel vettore colonna t.
Tutti i risolutori ODE di MATLAB® possono risolvere sistemi di equazioni della forma o problemi che coinvolgono una matrice di massa . Tutti i risolutori utilizzano sintassi simili. Il risolutore ode23s può risolvere solo problemi con una matrice di massa se la suddetta è costante. ode15s e ode23t possono risolvere problemi con una matrice di massa singolare, note come equazioni differenziali-algebriche (DAE). Specificare la matrice di massa utilizzando l'opzione Mass di odeset.
ode45 è un risolutore ODE versatile ed è il primo risolutore che si dovrebbe provare per la maggior parte dei problemi. Tuttavia, se il problema è rigido o richiede un'elevata precisione, esistono altri risolutori ODE che potrebbero essere più adatti al problema. Per maggiori informazioni vedere Scelta di un risolutore ODE.
[ utilizza inoltre le impostazioni di integrazione definite da t,y] = ode45(odefun,tspan,y0,options)options, che è un argomento creato utilizzando la funzione odeset. Ad esempio, utilizzare le opzioni AbsTol e RelTol per specificare le tolleranze di errore assolute e relative oppure l'opzione Mass per fornire una matrice di massa.
[ inoltre individua i punti in cui le funzioni di (t,y), chiamate funzioni evento, sono pari a zero. Nell'output, t,y,te,ye,ie] = ode45(odefun,tspan,y0,options)te è il tempo dell'evento, ye è la soluzione al tempo dell'evento ie è l'indice dell'evento attivato.
Per ciascuna funzione evento, specificare se l'integrazione deve terminare a zero e se la direzione del passaggio per lo zero è rilevante. A tal fine, impostare la proprietà 'Events' su una funzione, ad esempio myEventFcn o @myEventFcn, e creare una funzione corrispondente: [value,isterminal,direction] = myEventFcn(t,y). Per maggiori informazioni, vedere ODE Event Location.
Esempi
Le ODE semplici che hanno un componente di soluzione singolo possono essere specificate come funzione anonima nella chiamata al risolutore. La funzione anonima deve accettare due input (t,y), anche se uno degli input non è utilizzato nella funzione.
Risolvere l'ODE
Specificare un intervallo di tempo di [0 5] e la condizione iniziale y0 = 0.
tspan = [0 5]; y0 = 0; [t,y] = ode45(@(t,y) 2*t, tspan, y0);
Tracciare la soluzione.
plot(t,y,'-o')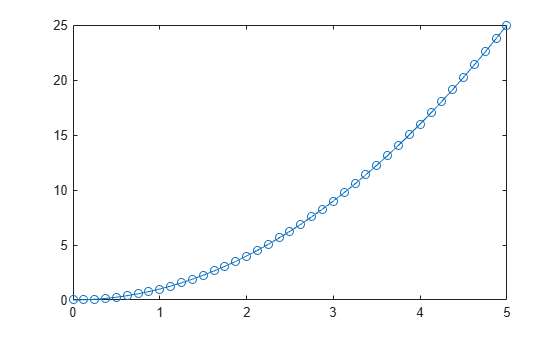
L'equazione di van der Pol è un'ODE di secondo ordine
dove è un parametro scalare. Riscrivere questa equazione come un sistema di ODE di primo ordine effettuando la sostituzione . Il sistema risultante di ODE di primo ordine è
Il file di funzione vdp1.m rappresenta l'equazione di van der Pol utilizzando . Le variabili e sono gli elementi y(1) e y(2) di un vettore a due elementi dydt.
function dydt = vdp1(t,y) %VDP1 Evaluate the van der Pol ODEs for mu = 1 % % See also ODE113, ODE23, ODE45. % Jacek Kierzenka and Lawrence F. Shampine % Copyright 1984-2014 The MathWorks, Inc. dydt = [y(2); (1-y(1)^2)*y(2)-y(1)];
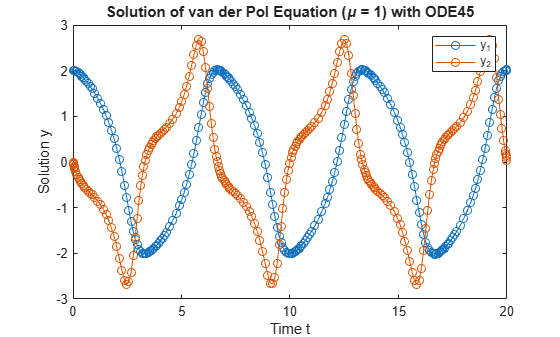
Risolvere l'ODE utilizzando la funzione ode45 nell'intervallo di tempo [0 20] con valori iniziali [2 0]. L'output risultante è un vettore colonna di punti temporali t e un array di soluzioni y. Ciascuna riga in y corrisponde a un tempo restituito nella riga corrispondente di t. La prima colonna di y corrisponde a , mentre la seconda colonna corrisponde a .
[t,y] = ode45(@vdp1,[0 20],[2; 0]);
Tracciare le soluzioni per e rispetto a t.
plot(t,y(:,1),'-o',t,y(:,2),'-o') title('Solution of van der Pol Equation (\mu = 1) with ODE45'); xlabel('Time t'); ylabel('Solution y'); legend('y_1','y_2')
ode45 è utilizzabile solo con funzioni che utilizzano due argomenti di input t e y. Tuttavia, è possibile passare ulteriori parametri definendoli al di fuori della funzione e inserendoli quando si specifica l'handle della funzione.
Risolvere l'ODE
Riscrivendo l'equazione come sistema di primo ordine si ottiene
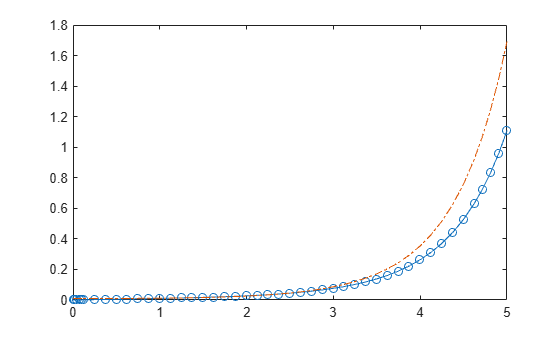
odefcn, una funzione locale inclusa alla fine di questo esempio, rappresenta questo sistema di equazioni come una funzione che accetta quattro argomenti di input: t, y, A e B.
function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
Risolvere l'ODE utilizzando ode45. Specificare l'handle della funzione in modo che passi i valori predefiniti per A e B a odefcn.
A = 1; B = 2; tspan = [0 5]; y0 = [0 0.01]; [t,y] = ode45(@(t,y) odefcn(t,y,A,B), tspan, y0);
Tracciare i risultati.
plot(t,y(:,1),'-o',t,y(:,2),'-.')
function dydt = odefcn(t,y,A,B) dydt = zeros(2,1); dydt(1) = y(2); dydt(2) = (A/B)*t.*y(1); end
Per i sistemi di ODE semplici con una sola equazione, è possibile specificare y0 come vettore contenente più condizioni iniziali. Questa tecnica crea un sistema di equazioni indipendenti tramite espansione scalare, una per ciascun valore iniziale, e ode45 risolve il sistema per produrre risultati per ciascun valore iniziale.
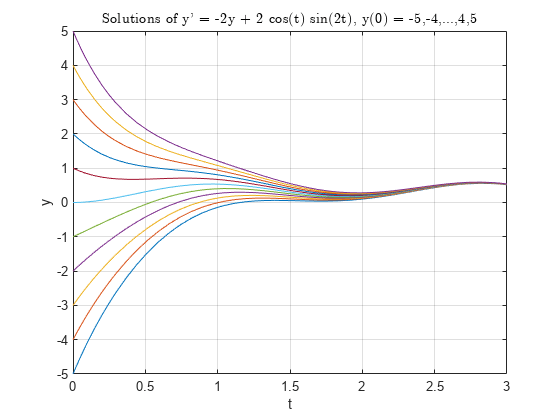
Creare una funzione anonima per rappresentare l'equazione . La funzione deve accettare due input per t e y.
yprime = @(t,y) -2*y + 2*cos(t).*sin(2*t);
Creare un vettore di condizioni iniziali diverse nell'intervallo .
y0 = -5:5;
Risolvere l'equazione per ciascuna condizione iniziale nell'intervallo di tempo utilizzando ode45.
tspan = [0 3]; [t,y] = ode45(yprime,tspan,y0);
Tracciare i risultati.
plot(t,y) grid on xlabel('t') ylabel('y') title('Solutions of y'' = -2y + 2 cos(t) sin(2t), y(0) = -5,-4,...,4,5','interpreter','latex')
Questa tecnica risulta utile per risolvere ODE semplici con condizioni iniziali diverse. Tuttavia, questa tecnica presenta anche alcuni compromessi:
Non è possibile risolvere sistemi di equazioni con più condizioni iniziali. La tecnica funziona solo quando si risolve un'equazione con più condizioni iniziali.
Il passo temporale scelto dal risolutore a ogni tempo si basa sull'equazione nel sistema che richiede il passo più piccolo. Questo significa che il risolutore può eseguire piccoli passi per soddisfare l'equazione per una condizione iniziale, ma le altre equazioni, se risolte separatamente, utilizzerebbero passi di dimensioni diverse. Ciononostante, risolvere più condizioni iniziali contemporaneamente è generalmente più veloce che risolvere le equazioni separatamente utilizzando un
forloop.
Per maggiori informazioni su questa tecnica, vedere Solve System of ODEs with Multiple Initial Conditions.
Si consideri la seguente ODE con parametri dipendenti dal tempo

La condizione iniziale è  . La funzione
. La funzione f(t) è definita dal vettore n x 1 f valutato ai tempi ft. La funzione g(t) è definita dal vettore m x 1 g valutato ai tempi gt.
Creare i vettori f e g.
ft = linspace(0,5,25); f = ft.^2 - ft - 3; gt = linspace(1,6,25); g = 3*sin(gt-0.25);
Scrivi una funzione denominata myode che interpoli f e g per ottenere il valore dei termini dipendenti dal tempo al tempo specificato. Salvare la funzione nella cartella attuale per eseguire il resto dell'esempio.
La funzione myode accetta ulteriori argomenti di input per valutare l'ODE a ogni passo temporale, ma ode45 utilizza solo i primi due argomenti di input t e y.
function dydt = myode(t,y,ft,f,gt,g) f = interp1(ft,f,t); % Interpolate the data set (ft,f) at time t g = interp1(gt,g,t); % Interpolate the data set (gt,g) at time t dydt = -f.*y + g; % Evaluate ODE at time t
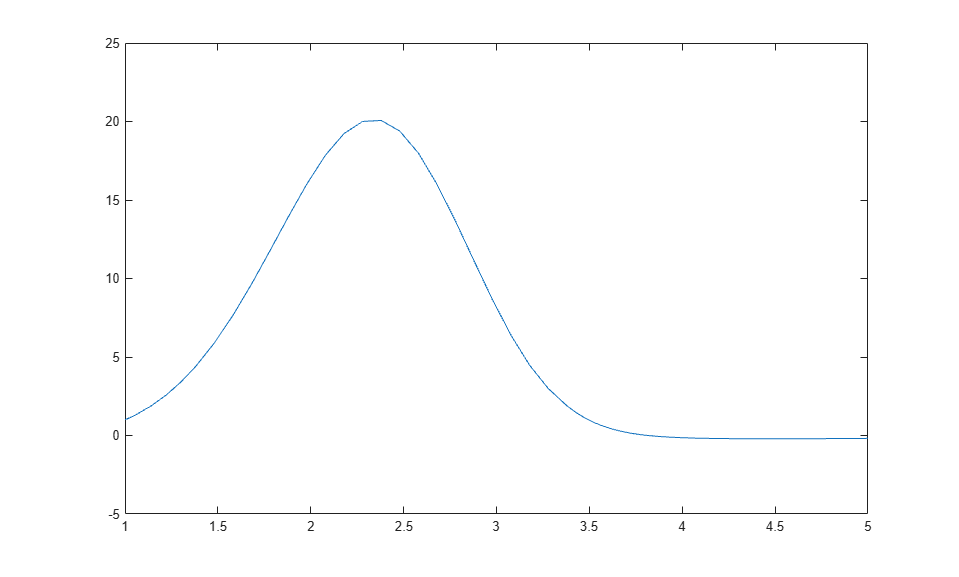
Risolvere l'equazione nell'intervallo di tempo [1 5] utilizzando ode45. Specificare la funzione utilizzando un handle della funzione in modo che ode45 utilizzi solo i primi due argomenti di input di myode. Ridurre inoltre la restrittività delle soglie di errore utilizzando odeset.
tspan = [1 5]; ic = 1; opts = odeset('RelTol',1e-2,'AbsTol',1e-4); [t,y] = ode45(@(t,y) myode(t,y,ft,f,gt,g), tspan, ic, opts);
Tracciare la soluzione y come funzione dei punti temporali t.
plot(t,y)
L'equazione di van der Pol è un'ODE di secondo ordine
Risolvere l'equazione di van der Pol con utilizzando ode45. La funzione vdp1.m è fornita con MATLAB® e codifica le equazioni. Specificare un unico output per restituire una struttura contenente informazioni sulla soluzione, come il risolutore e i punti di valutazione.
tspan = [0 20]; y0 = [2 0]; sol = ode45(@vdp1,tspan,y0)
sol = struct with fields:
solver: 'ode45'
extdata: [1×1 struct]
x: [0 1.0048e-04 6.0285e-04 0.0031 0.0157 0.0785 0.2844 0.5407 0.8788 1.4032 1.8905 2.3778 2.7795 3.1285 3.4093 3.6657 3.9275 4.2944 4.9013 5.3506 5.7998 6.2075 6.5387 6.7519 6.9652 7.2247 7.5719 8.1226 8.6122 9.1017 9.5054 … ] (1×60 double)
y: [2×60 double]
stats: [1×1 struct]
idata: [1×1 struct]
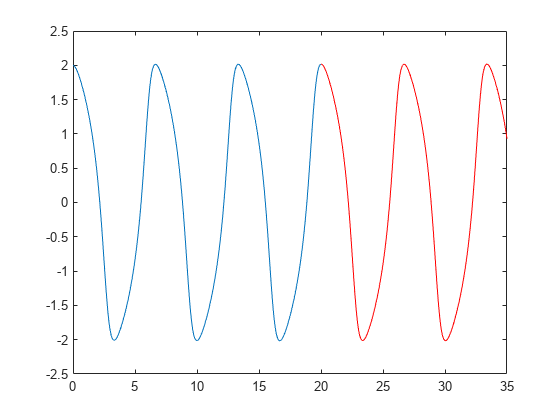
Utilizzare linspace per generare 250 punti nell'intervallo [0 20]. Valutare la soluzione in questi punti utilizzando deval.
x = linspace(0,20,250); y = deval(sol,x);
Tracciare il primo componente della soluzione.
plot(x,y(1,:))

Estendere la soluzione a utilizzando odextend e aggiungere il risultato al grafico originale.
sol_new = odextend(sol,@vdp1,35); x = linspace(20,35,350); y = deval(sol_new,x); hold on plot(x,y(1,:),'r')
Argomenti di input
Argomenti di output
Algoritmi
ode45 si basa su una formula di Runge-Kutta esplicita (4,5), la coppia Dormand-Prince. Si tratta di un risolutore a passo singolo: per calcolare y(tn), necessita solo della soluzione al punto temporale immediatamente precedente y(tn-1) [1], [2].
Riferimenti
[1] Dormand, J. R. and P. J. Prince, “A family of embedded Runge-Kutta formulae,” J. Comp. Appl. Math., Vol. 6, 1980, pp. 19–26.
[2] Shampine, L. F. and M. W. Reichelt, “The MATLAB ODE Suite,” SIAM Journal on Scientific Computing, Vol. 18, 1997, pp. 1–22.
Funzionalità estese
Cronologia versioni
Introduzione prima di R2006a