PLL with Feed Forward
Compute position and angular frequency from orthogonal sinusoidal signals
Since R2023b
Libraries:
Motor Control Blockset /
Signal Management
Description
The PLL with Feed Forward block computes angular position (θ) or its sine and cosine equivalents (sin θ, cos θ) and the angular frequency (ω) from two orthogonal sinusoidal signals.
In addition to the angular frequency, the block uses either a sine-cosine lookup table to calculate the angular position or an oscillator based algorithm to compute the sine and cosine equivalents of position. You can use the Position output parameter to output either angular position or its sine and cosine equivalents.
The two orthogonal sinusoidal input signals must have identical peak magnitudes. If the inputs are not normalized in the range of [-1,1], select the Enable input normalization parameter.
The following image shows the relationship between block inputs and outputs:
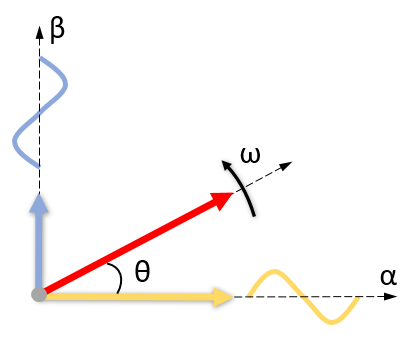
For more information on the block algorithm, see Algorithm.
Note
The block does not support 16-bit fixed-point inputs.
In addition, you can use the advanced options to enable the ParameterBus input port, which you can use with the Compute Parameter block to update the block parameters optimally at run-time. You can use this functionality when motor parameters can change over time, for example, while building applications that may require swapping of motors at run-time.
Examples

Initial Position Estimation and Field-Weakening Control of IPMSM Using Pulsating High-Frequency Injection and Extended EMF Observer
Uses sensorless techniques such as pulsating high-frequency injection and extended EMF observer to estimate and track motor position to run an interior permanent magnet synchronous motor (IPMSM) operation using field-weakening control (FWC).
Ports
Input
Output
Parameters
Algorithms
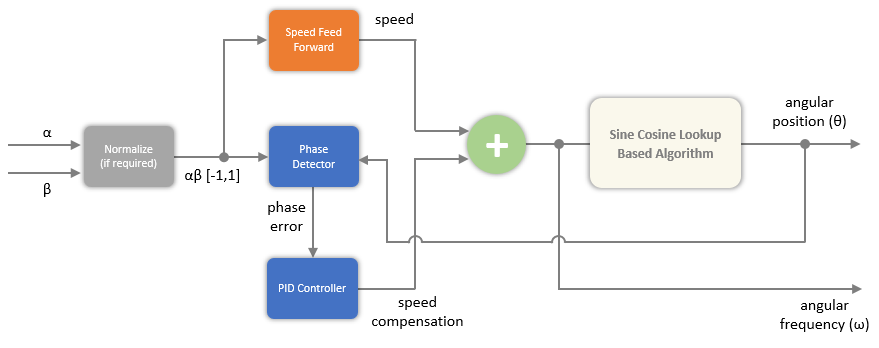
The following image provides an overview of how the block uses an algorithm based on
sine-cosine lookup table to compute the angular position (θ). Set the Position
output to Angular position to use this
algorithm.
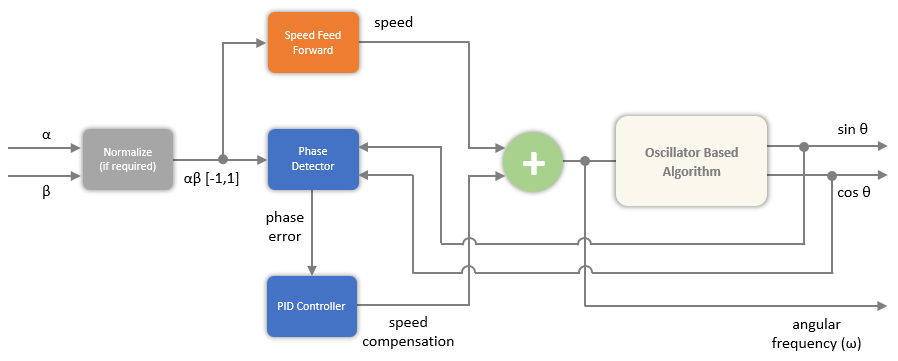
The following image provides an overview of how the block uses an oscillator-based
algorithm to compute the sine and cosine equivalents of angular position (θ). Set the
Position output to Sine and Cosine
Position to use this algorithm.
The following equation describes the state equation of the oscillator-based algorithm.
where, ω is the frequency of oscillation.
The following image shows a linearized model of the angular frequency feedforward PLL that you can use for tuning purposes.

From this model you can obtain the following transfer function of position estimation error (ΔE(s)) with respect to actual position (θ(s)) to tune the feedforward PLL.
where:
Kp and Ki are the proportional and integral gains, respectively, of the PID controller used by the block for angular frequency computation.
ωc is the cutoff frequency for the output filter.
References
[1] G. Liu, H. Zhang and X. Song, "Position-Estimation Deviation-Suppression Technology of PMSM Combining Phase Self-Compensation SMO and Feed-Forward PLL," in IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 9, no. 1, pp. 335-344, Feb. 2021, doi: 10.1109/JESTPE.2020.2967508.
[2] Se-Kyo Chung, "A phase tracking system for three phase utility interface inverters," in IEEE Transactions on Power Electronics, vol. 15, no. 3, pp. 431-438, May 2000, doi: 10.1109/63.844502.
[3] Sreeraman Rajan, Sichun Wang, Robert Inkol, and Alain Joyal. "Efficient Approximations for the Arctangent Function." IEEE SIGNAL PROCESSING MAGAZINE (MAY 2006).
Extended Capabilities
Version History
Introduced in R2023b