binaryOccupancyMap
Crea una griglia di occupazione con valori binari
Descrizione
binaryOccupancyMap crea un oggetto mappa di occupazione 2D, che puoi utilizzare per rappresentare e visualizzare l'area di lavoro di un robot, compresi gli ostacoli. L'integrazione dei dati dei sensori e delle stime di posizione crea una rappresentazione spaziale delle posizioni approssimative degli ostacoli.
Le griglie di occupazione vengono utilizzate negli algoritmi di robotica come la pianificazione del percorso. Vengono utilizzati anche nelle applicazioni di mappatura, ad esempio per trovare percorsi privi di collisioni, evitare collisioni e calcolare la localizzazione. Puoi modificare la griglia di occupazione per adattarla alla tua applicazione specifica.
Ogni cella nella griglia di occupazione ha un valore che rappresenta lo stato di occupazione di quella cella. Una posizione occupata è rappresentata come true (1) e una posizione libera è rappresentata come false (0).
L'oggetto tiene traccia di tre sistemi di riferimento: mondiale, locale e griglia. L'origine del frame mondiale è definita da GridLocationInWorld, che definisce l'angolo inferiore sinistro della mappa rispetto al frame mondiale. La proprietà LocalOriginInWorld specifica la posizione dell'origine del frame locale rispetto al frame mondiale. La prima posizione della griglia con indice (1,1) inizia nell'angolo in alto a sinistra della griglia.
Nota
In precedenza questo oggetto si chiamava robotics.BinaryOccupancyGrid .
Creazione
Sintassi
Descrizione
map = binaryOccupancyMap crea una griglia di occupazione binaria 2D con una larghezza e un'altezza di 10 m. La risoluzione predefinita della griglia è una cella per metro.
map = binaryOccupancyMap(rows,cols, crea una griglia di occupazione binaria 2D di dimensioni (resolution,"grid")rows,cols).
map = binaryOccupancyMap( crea una griglia dai valori nella matrice p)p. La dimensione della griglia corrisponde alla dimensione della matrice, con ogni valore di cella interpretato in base alla sua posizione nella matrice. p contiene qualsiasi tipo numerico o logico con zeri (0) e uni (1).
map = binaryOccupancyMap( crea una mappa da una matrice con la proprietà p,resolution)Resolution specificata in celle per metro.
map = binaryOccupancyMap( crea un oggetto utilizzando i valori di un altro oggetto sourcemap)binaryOccupancyMap.
map = binaryOccupancyMap( crea un oggetto utilizzando i valori di un altro oggetto sourcemap,resolution)binaryOccupancyMap, ma ricampiona la matrice per ottenere la risoluzione specificata.
map = binaryOccupancyMap(___, imposta le proprietà utilizzando uno o più argomenti nome-valore.Name=Value)
Argomenti di input
Proprietà
Funzioni oggetto
copy | Create copy of binary occupancy map |
checkOccupancy | Check if locations are free or occupied |
getOccupancy | Get occupancy value of locations |
grid2local | Convert grid indices to local coordinates |
grid2world | Convert grid indices to world coordinates |
inflate | Inflate each occupied location |
insertRay | Insert ray from laser scan observation |
local2grid | Convert local coordinates to grid indices |
local2world | Convert local coordinates to world coordinates |
move | Move map in world frame |
occupancyMatrix | Convert occupancy grid to matrix |
raycast | Compute cell indices along a ray |
rayIntersection | Find intersection points of rays and occupied map cells |
setOccupancy | Set occupancy value of locations |
show | Display binary occupancy map |
syncWith | Sync map with overlapping map |
world2grid | Convert world coordinates to grid indices |
world2local | Convert world coordinates to local coordinates |
Esempi
Crea una mappa vuota di 10 m x 10 m.
map = binaryOccupancyMap(10,10,10);
Imposta l'occupazione delle posizioni nel mondo e mostra la mappa.
x = [1.2; 2.3; 3.4; 4.5; 5.6]; y = [5.0; 4.0; 3.0; 2.0; 1.0]; setOccupancy(map, [x y], ones(5,1)) figure show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_01_it.png)
Aumenta le posizioni occupate in base a un raggio dato.
inflate(map, 0.5) figure show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_02_it.png)
Ottieni le posizioni della griglia dalle località del mondo.
ij = world2grid(map, [x y]);
Imposta le posizioni della griglia su posizioni libere.
setOccupancy(map, ij, zeros(5,1), 'grid')
figure
show(map)![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_03_it.png)
Questo esempio mostra come convertire un'immagine in una griglia di occupazione binaria da utilizzare con la mappatura e la pianificazione del percorso.
Importa immagine.
image = imread('imageMap.png');Convertire l'immagine in scala di grigi e poi in bianco e nero in base al valore soglia specificato.
grayimage = rgb2gray(image); bwimage = grayimage < 0.5;
Utilizzare un'immagine in bianco e nero come input della matrice per la griglia di occupazione binaria.
grid = binaryOccupancyMap(bwimage); show(grid)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](imagetobinaryoccupancygridexampleexample_01_it.png)
Questo esempio mostra come convertire un file .pgm in un oggetto binaryOccupancyMap da utilizzare in MATLAB.
Importa l'immagine usando imread . L'immagine è piuttosto grande e dovrebbe essere ritagliata nella zona interessata.
image = imread('playpen_map.pgm');
imageCropped = image(750:1250,750:1250);
imshow(imageCropped)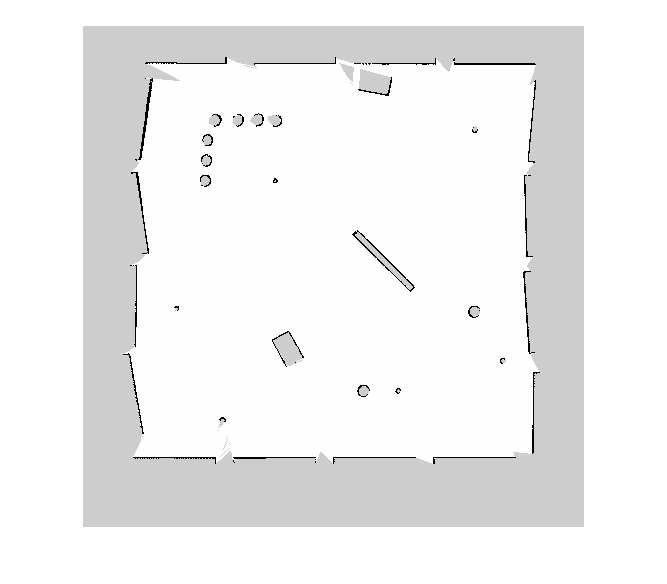
Le aree sconosciute (in grigio) devono essere rimosse e trattate come spazio libero. Creare una matrice logica basata su una soglia. Questo valore potrebbe variare a seconda dell'immagine. Lo spazio occupato dovrebbe essere impostato su 1 (bianco nell'immagine).
imageBW = imageCropped < 100; imshow(imageBW)
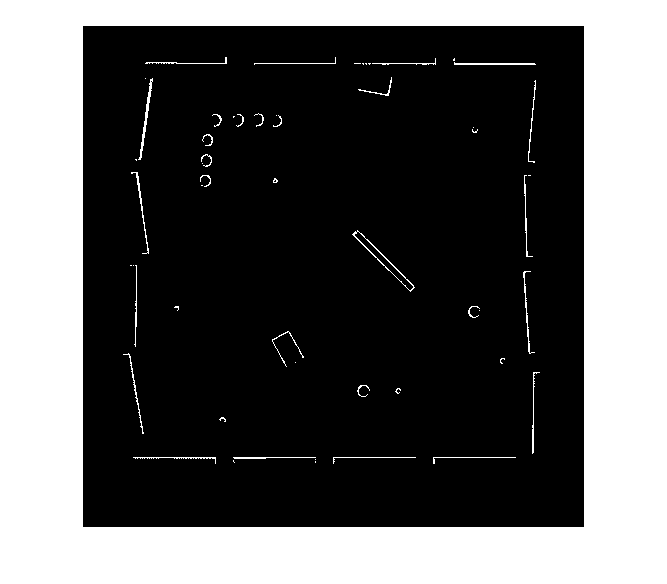
Crea l'oggetto binaryOccupancyMap utilizzando l'immagine della mappa modificata.
map = binaryOccupancyMap(imageBW); show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](convertpgmimagetomapexample_03_it.png)